

Correction function-generating device, robot control system, and robot system
A technology for correcting functions and generating devices, which can be applied in general control systems, control/regulation systems, computer control, etc., and can solve problems such as loss of operation accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
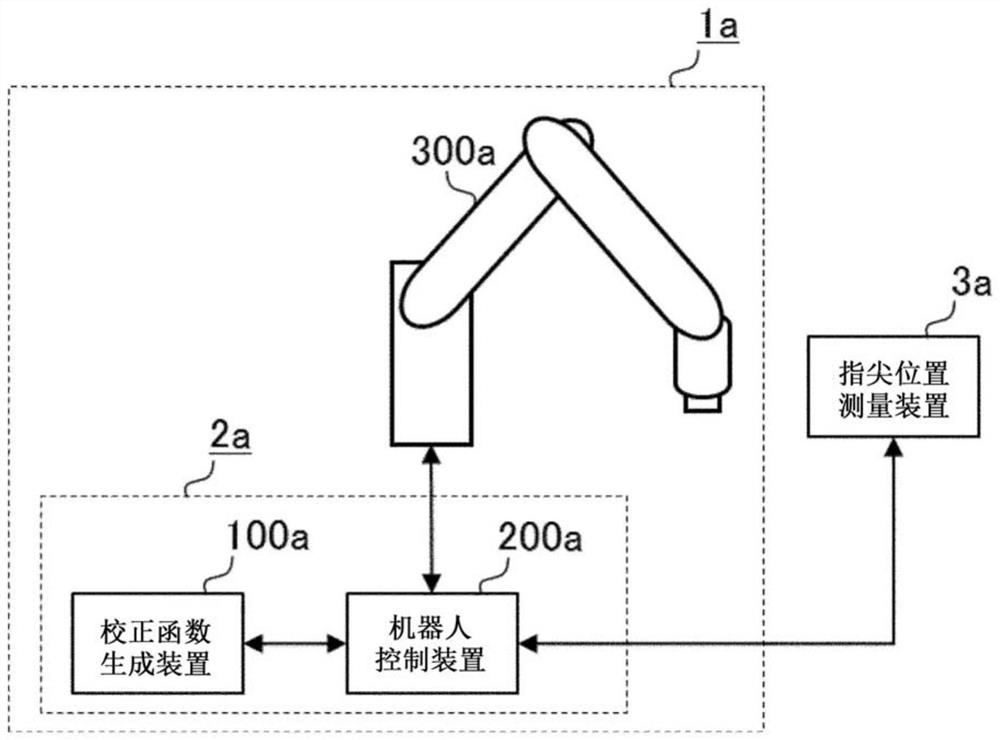
[0041] figure 1 It is a figure which shows an example of the structure of the robot system 1a and the robot control system 2a which have the correction function generation apparatus 100a concerning Embodiment 1 of this invention. The robot system 1a has: a robot having a robot arm 300a; and a robot control system 2a. In addition, the robot control system 2a includes a correction function generation device 100a and a robot control device 200a. In addition, in figure 1 The illustration of parts of the robot other than the robot arm 300a is omitted in FIG.
[0042] A fingertip position measuring device 3a for measuring the three-dimensional position of the fingertip of the robot arm 300a is connected to the robot system 1a. As the fingertip position measuring device 3a, for example, a laser distance sensor, a visual sensor, or the like is used. Here, the fingertip of the robot arm 300a is the tip of the robot arm 300a, and refers to a part that acts on the work object. The f...
Embodiment approach 2
[0099] The correction function generating device of the present embodiment evaluates the displacement of the fingertip position from the reference position to generate a correction function. Figure 11 It is a figure which shows an example of the structure of the robot system 1b and the robot control system 2b which have the correction function generation apparatus 100b concerning Embodiment 2 of this invention. The robot system 1b has: a robot having a robot arm 300a; and a robot control system 2b. In addition, the robot control system 2b has a correction function generation device 100b and a robot control device 200b. A fingertip position measuring device 3b is connected to the robot system 1b. exist Figure 11 In the robot system 1b shown, other structures except the robot control system 2b and the fingertip position measuring device 3b are the same as figure 1 The robot system 1a in Embodiment 1 shown is the same. Next, points of difference from the correction function...
Embodiment approach 3
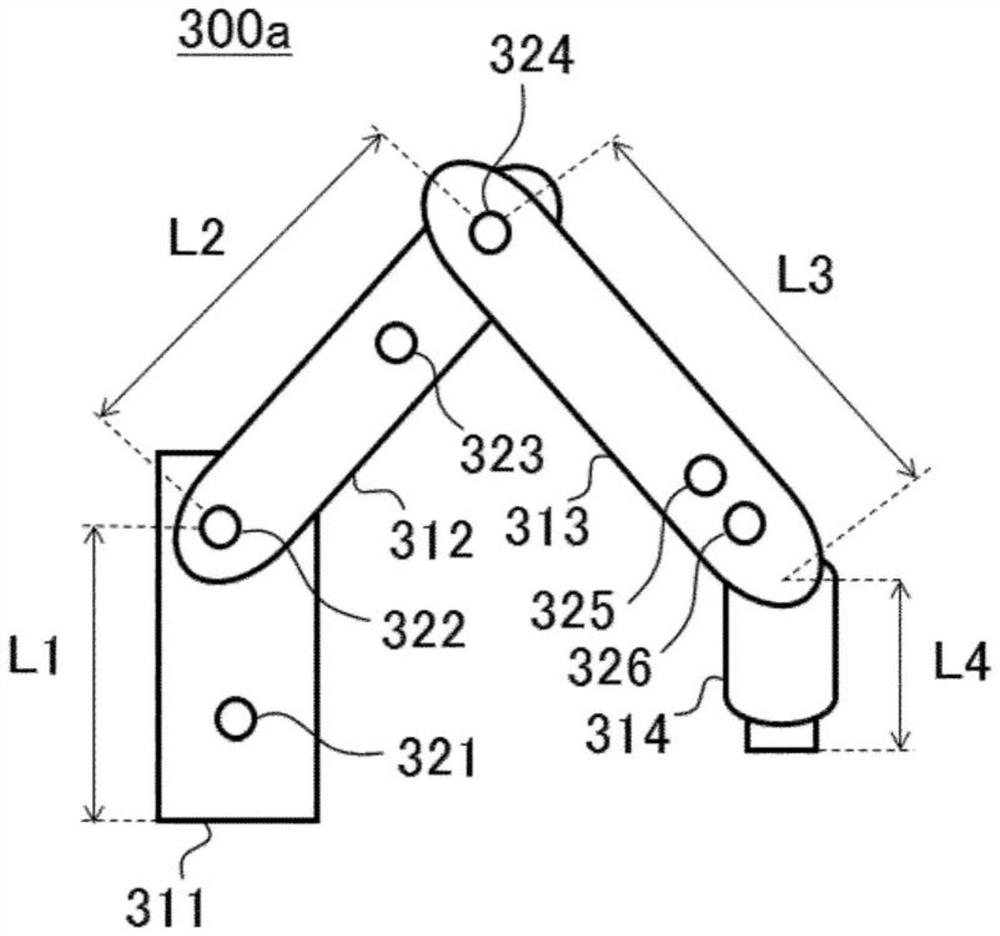
[0116] The correction function generation device 100a according to the first embodiment and the correction function generation device 100b according to the second embodiment are configured to generate a correction function based on temperature information measured by the temperature sensors 321 to 326 mounted on the robot arm 300a. On the other hand, the correction function generating device 100c of the present embodiment also generates a correction function using the ambient temperature around the robot arm 300a.
[0117] Figure 16 It is a figure which shows an example of the structure of the robot system 1c and the robot control system 2c which have the correction function generation apparatus 100c concerning Embodiment 3 of this invention. The robot system 1c has: a robot having a robot arm 300a; and a robot control system 2c. In addition, the robot control system 2c includes a correction function generating device 100c and a robot control device 200c. A fingertip positi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More