

Robot clamp grabbing algorithm
A robot fixture and algorithm technology, applied in the field of mechanical equipment, can solve problems such as inaccurate grasping positions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
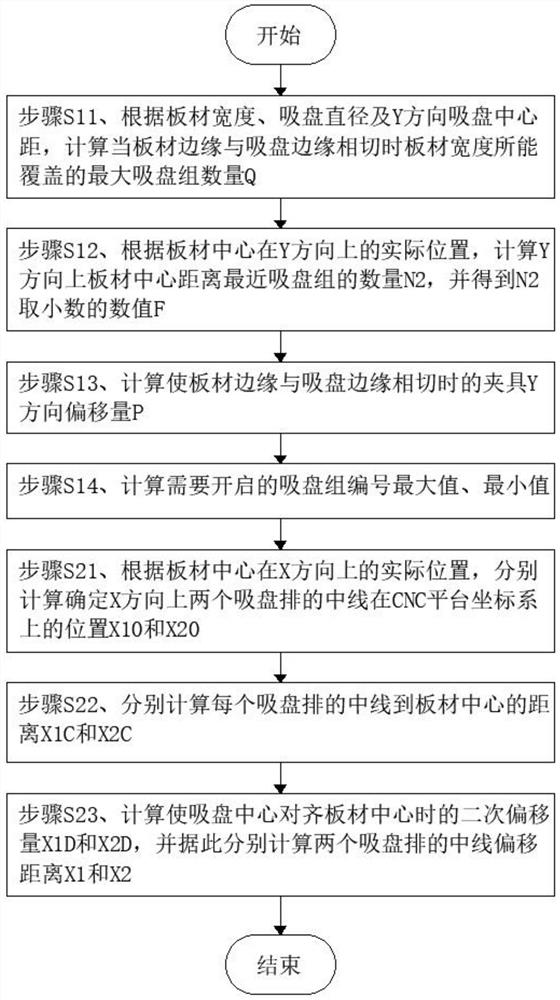
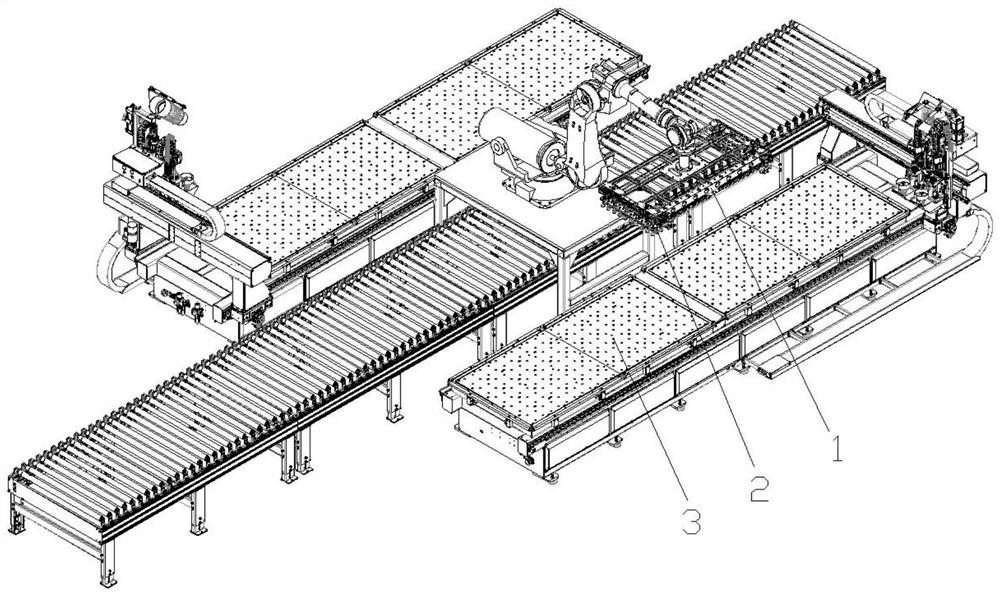
[0090] See how Figure 1 to Figure 10 , this embodiment provides a gripping algorithm for a robot gripper.
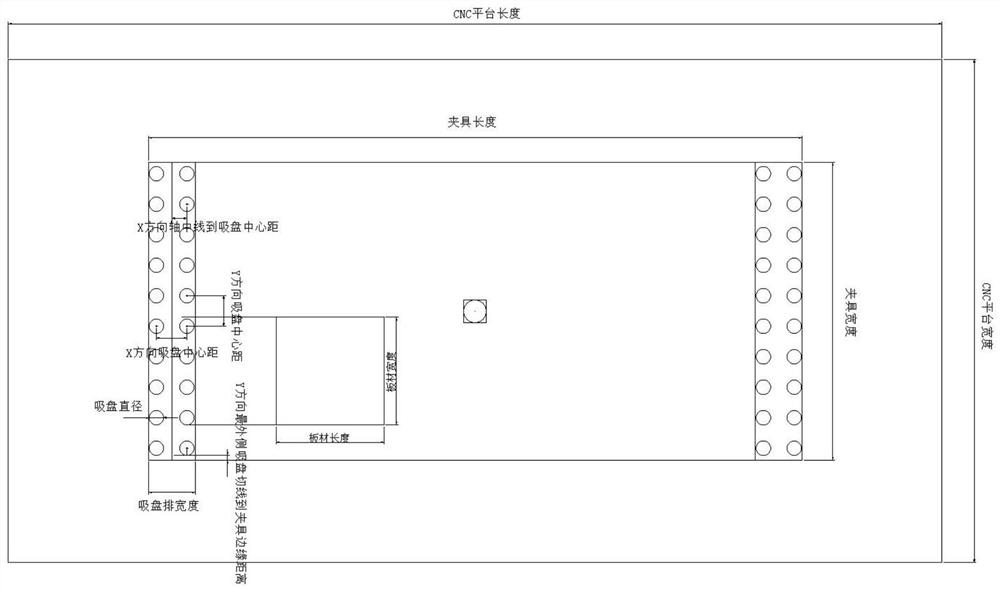
[0091] Such as Figure 2 to Figure 6 As shown, the robot gripper 1 includes two rows of suction cups 2 arranged at the bottom and capable of moving along the length direction of the gripper, which are respectively the first row of suckers and the second row of suckers, which are used to grab the cut sheet on the CNC platform 3. The first, Each row of suction cups includes two rows (X1_1, X1_2, X2_1, X2_2) of multiple groups of suction cups arranged in a straight line along the width of the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More