

Car following control method based on brain emotion learning loop model and control system thereof
A control method and emotional technology, applied in the field of car-following control method and its car-following control system based on the brain-emotional learning circuit model, can solve problems such as high psychological pressure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
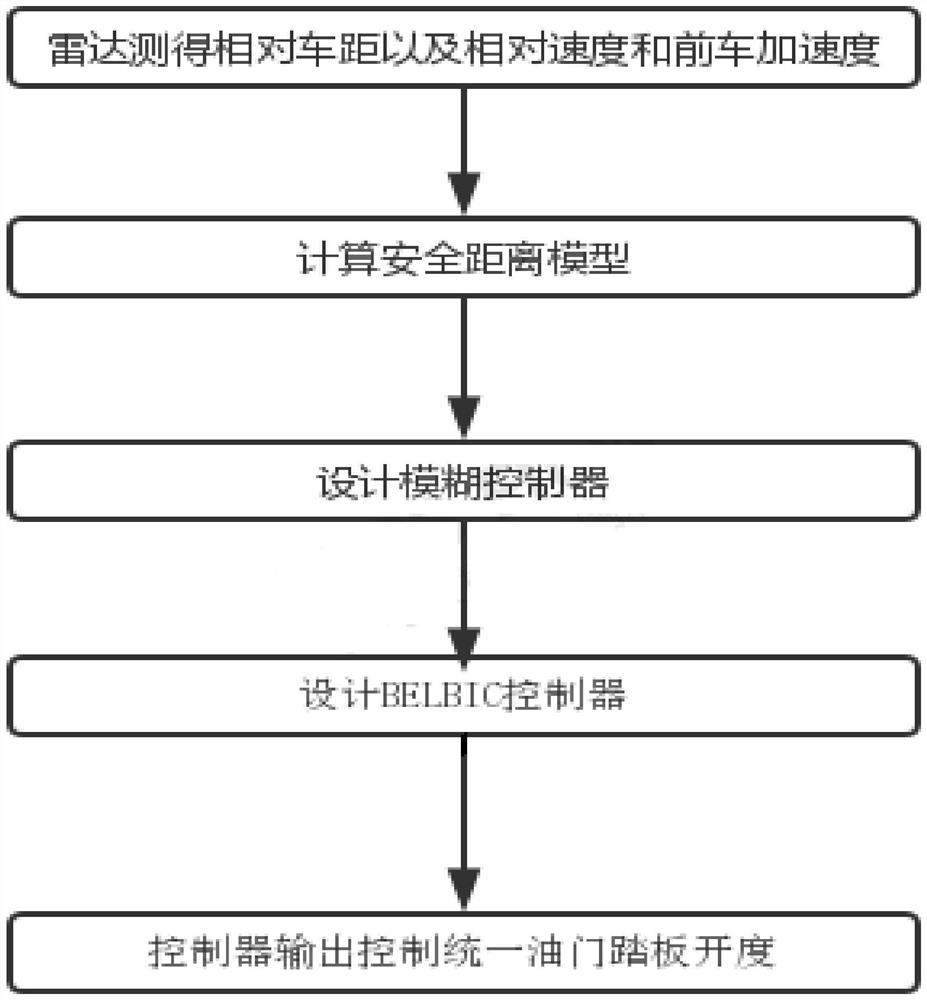
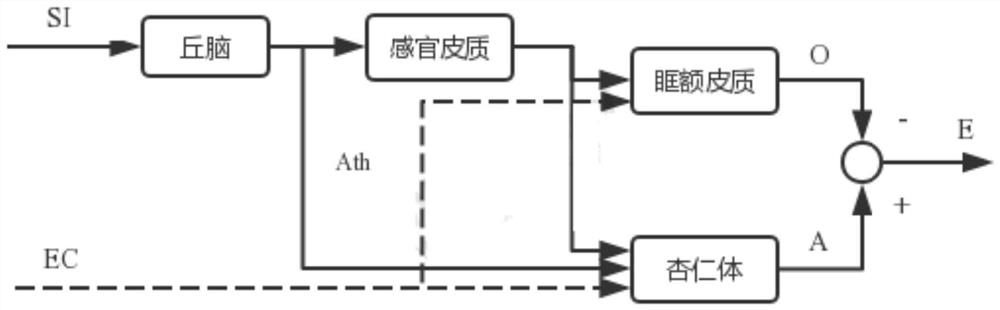
[0069] See figure 1 and figure 2 The car following control method of this embodiment mainly includes: designing the safety distance d_des between the self-car and the preceding vehicle; designing the distance error; designing an emotion controller based on the brain emotion learning circuit model, and finally using E as the unified accelerator pedal of the self-car degree. Finally complete the follow-up control.
[0070] First, the following control method of the present invention will be introduced in detail.
[0071] Step 1: According to the headway th and the speed of the vehicle v x , The minimum safety distance d that should be maintained when the vehicle and the preceding vehicle are relatively stationary without collision 0 , Design the safety distance d_des between the vehicle and the preceding vehicle: d_des=th×v x +d 0 .
[0072] In this embodiment, the design method of the headway th is:
[0073]
[0074] Where th 0 Represents the basic headway, K r Represents the relat...
Embodiment 2
[0108] Embodiment 2 is a specific example of Embodiment 1.
[0109] The car following control method of embodiment 2 only considers the situation of the front and rear cars. First, the actual distance between the two cars d_act and the relative speed v are detected by radar. r And the acceleration of the preceding vehicle a f .
[0110] The variable headway safety distance model considering the speed of the vehicle, the relative speed of the two vehicles, the acceleration of the preceding vehicle and the road adhesion coefficient is:
[0111] d_des=thv x +d 0
[0112] Where d_des represents the expected safety distance, th represents the headway, v x Is the vehicle speed, d 0 Indicates the minimum safe distance that should be maintained when two vehicles are relatively stationary without a collision.
[0113] The algorithm of variable headway th is:
[0114]
[0115] Where th 0 Represents the basic headway, Kr represents the relative speed coefficient of the two vehicles, K f Represents ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More