

Unmanned vehicle, path planning method and device thereof and readable storage medium
A path planning, unmanned vehicle technology, applied in the field of transportation, can solve problems such as reducing the working efficiency of unmanned vehicles, increasing congestion, and cumbersomeness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
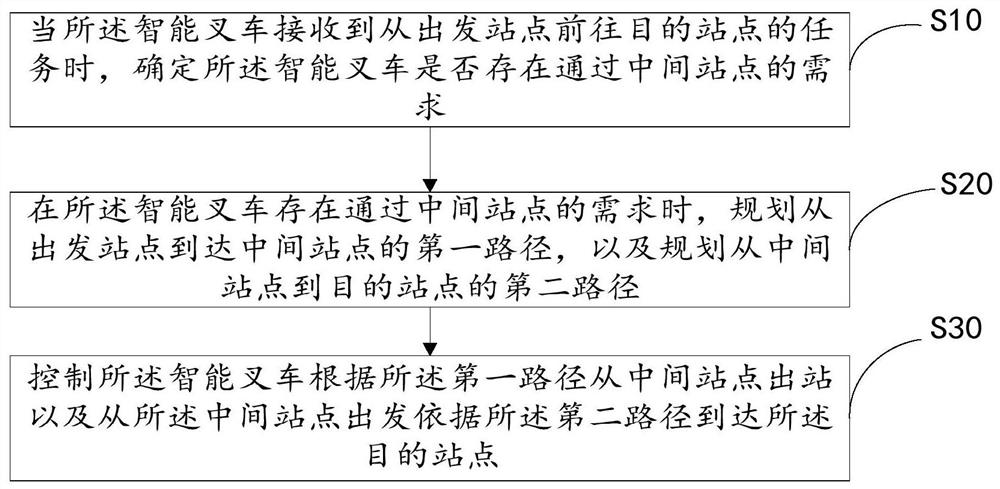
[0046] The main solution of the embodiment of the present application is: when the unmanned vehicle receives a task from the departure site to the destination site, determine whether the unmanned vehicle needs to pass through the intermediate station; When the needs of the intermediate site, plan the first path from the departure site to the intermediate site, and plan the second path from the intermediate site to the destination site; control the unmanned vehicle to exit from the intermediate site and from the intermediate site to the The intermediate station departs to the destination station according to the second route.
[0047] In the existing technology, unmanned vehicles are often arranged to unify the path from the departure site to the destination site, but it does not take into account ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More