Monocular SLAM scale recovery method
A monocular and scale technology, applied in image data processing, instrumentation, computing, etc., can solve problems such as monocular SLAM scale uncertainty, and achieve high precision and good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
[0042] In ORB-SLAM2, the median value of the map point depth generated in the first frame is used as the unit size 1 to complete the initialization of the map size. If you want to restore the scale, you must know in advance the size of some objects in the real scene (with unit information) and their corresponding size in the map (without unit information), and calculate the scale factor to restore the scale of all objects in the scene information.
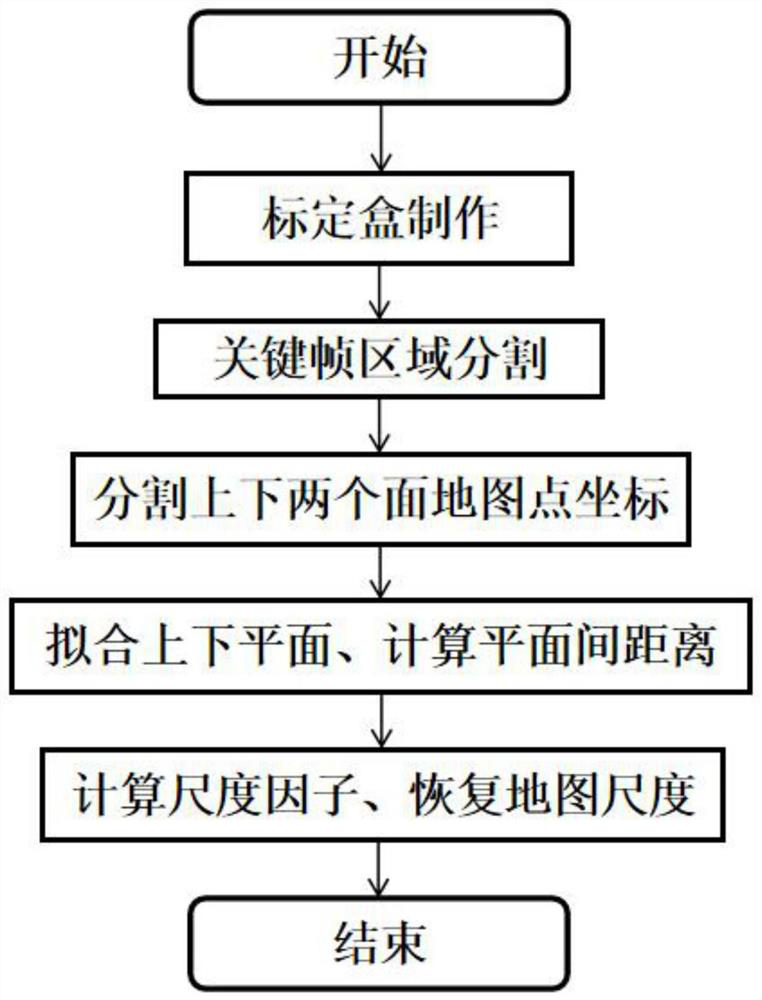
[0043] refer to figure 1 As shown, the present invention discloses a method for monocular SLAM scale recovery, comprising the following steps:
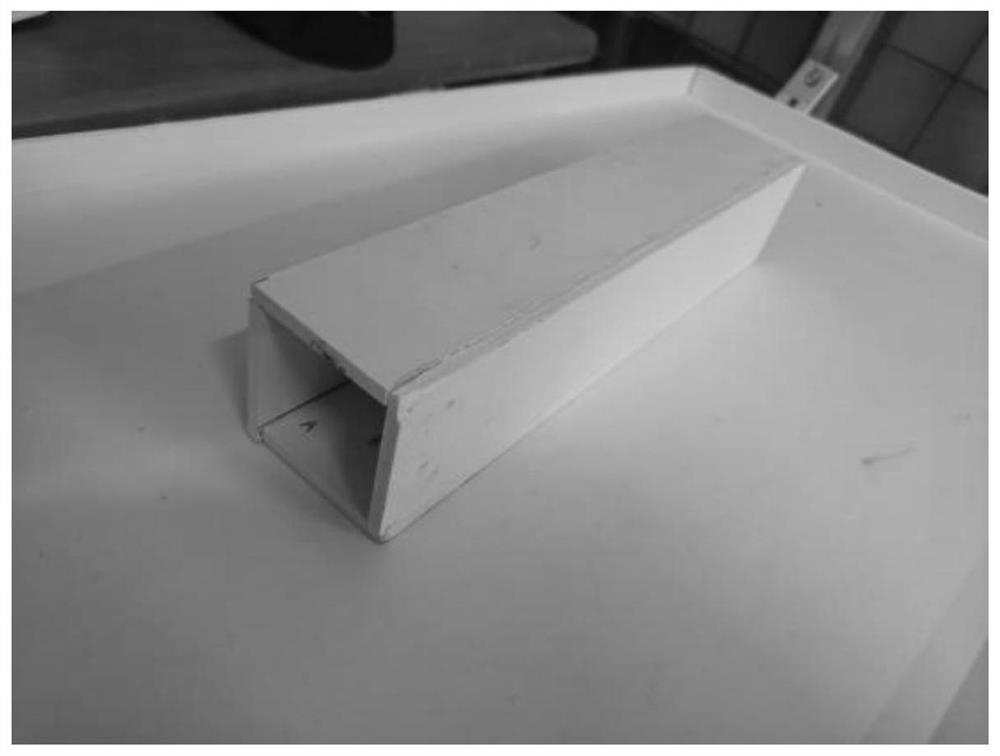
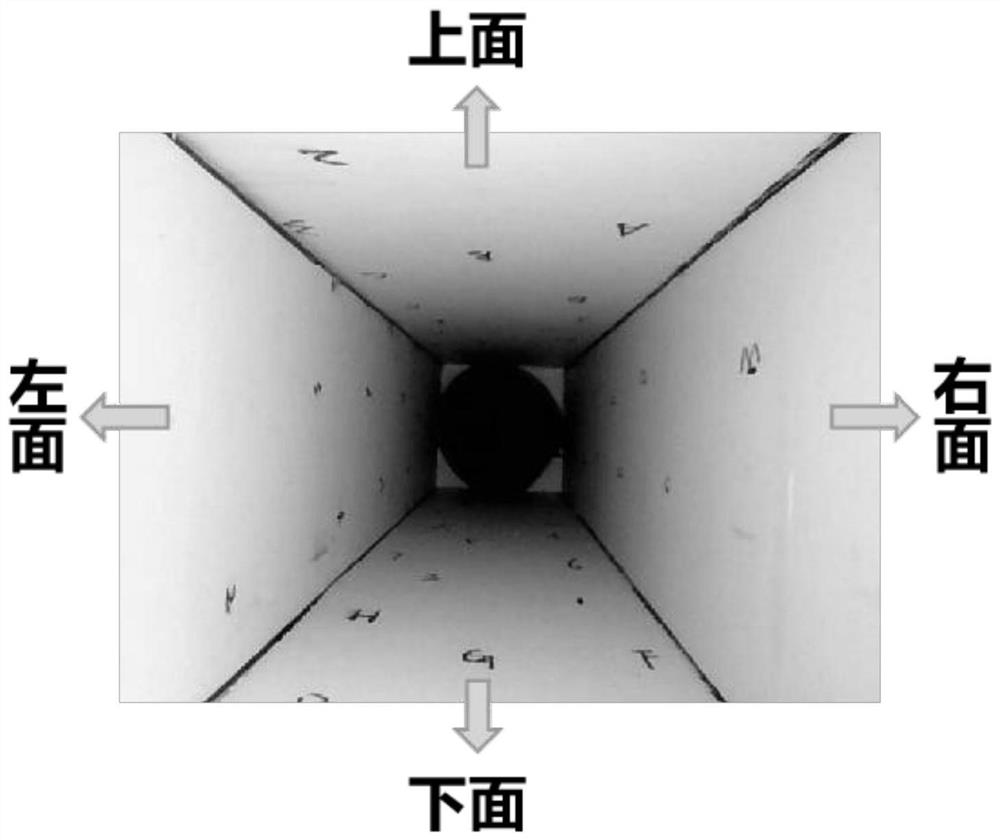
[0044] S1. Make a calibration box, the calibration box is provided with a rectangular th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More