

Small multifunctional underwater robot and working method thereof
An underwater robot and multi-functional technology, applied to underwater operation equipment, underwater ships, motor vehicles, etc., can solve problems such as limitations, complicated operation, and large space occupation, and achieve the goal of improving battery life and underwater operation time Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
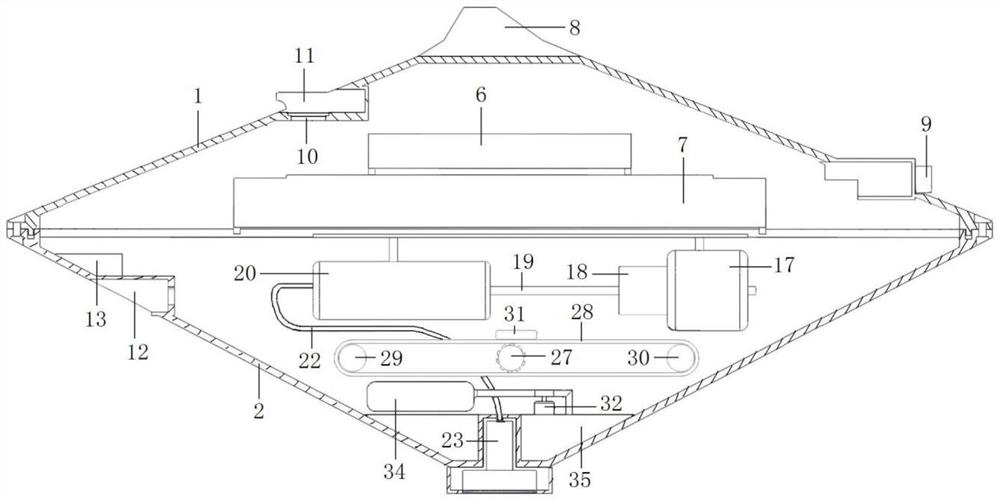
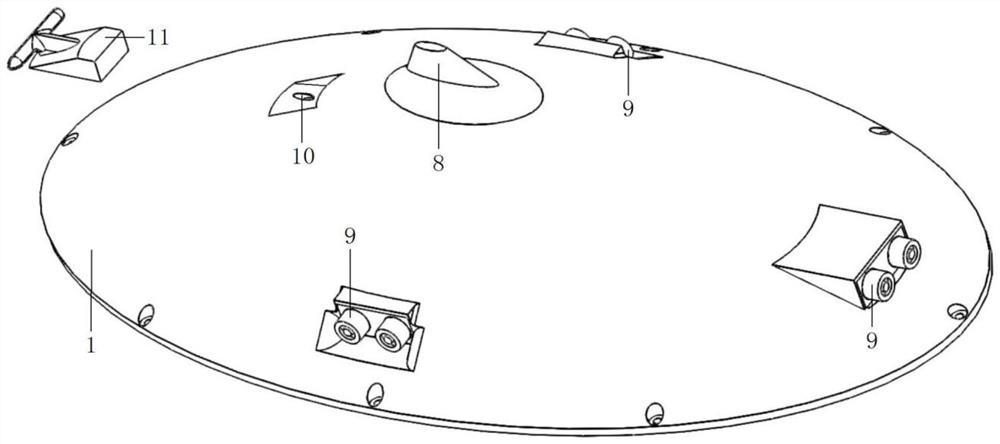
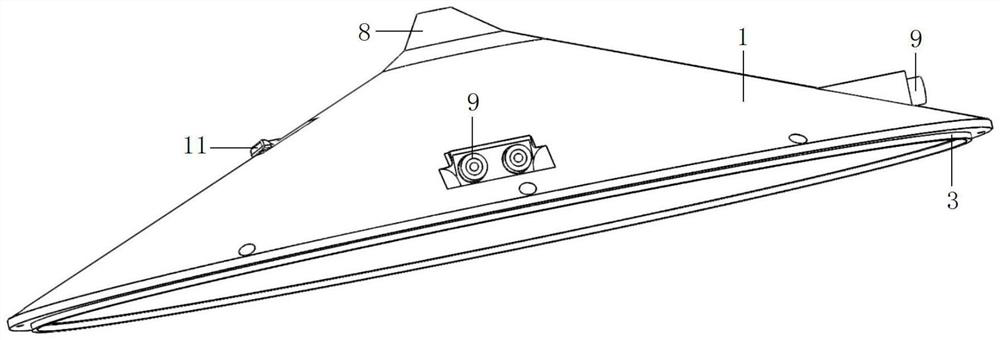
[0041] Such as Figure 1-8 As shown, a small multifunctional underwater robot includes a shell, an electric control module, a double propeller propulsion mechanism, a buoyancy lifting mechanism and an attitude adjustment mechanism; Inside the body, the buoyancy elevating mechanism is located at the bottom of the shell, the attitude adjustment mechanism is located above the buoyancy elevating mechanism, the electronic control module is located above the attitude adjustment mechanism, and the dual-propeller propulsion mechanism is located outside the shell.
[0042] The shell adopts a streamlined disc structure, including an upper shell 1 and a lower shell 2. The upper shell 1 and the lower shell 2 are fastened to form a complete shell, and the upper shell 1 and the lower shell 2 are connected by bolts. The connection is fixed; the low...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More