

A heading angle calculation method based on front-end fusion
A calculation method and heading angle technology, applied in the field of robot heading angle calculation, can solve problems such as insufficient precision, accumulated error, and lost positioning, and achieve the effect of enhancing stability and accuracy, stable and reliable heading angle, and eliminating accumulated error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to further explain the technical solution of the present invention, the present invention will be described in detail below through specific examples.
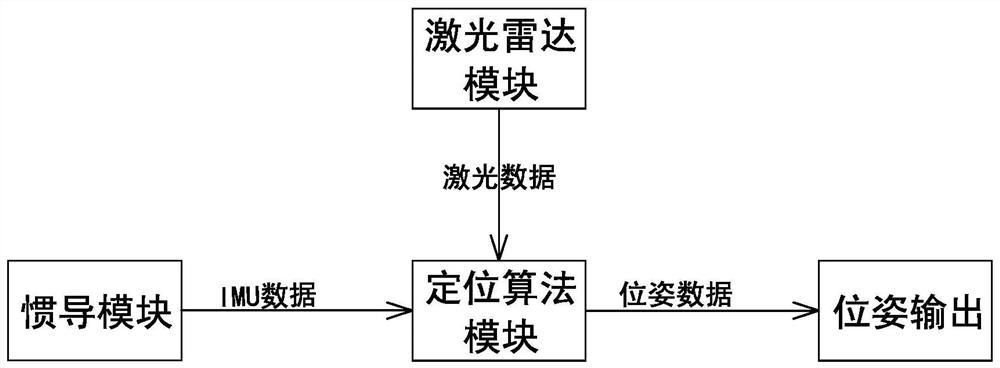
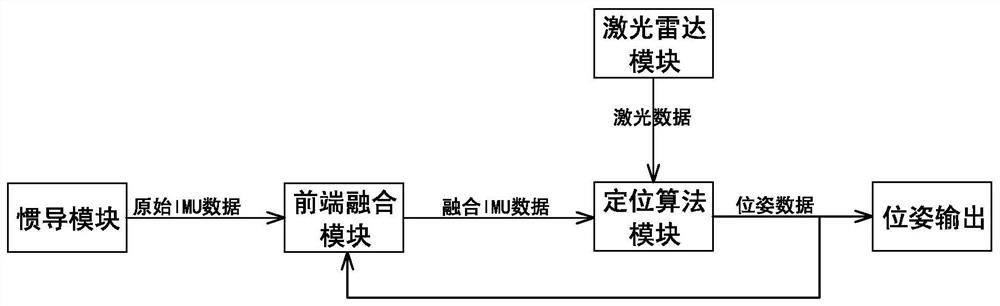
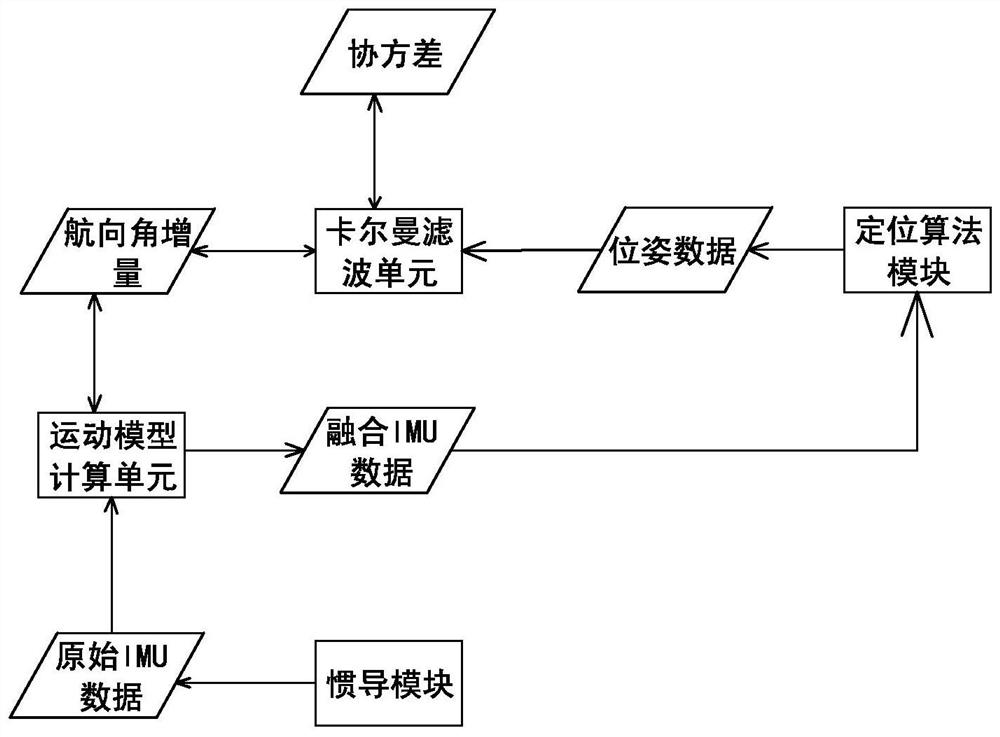
[0020] A heading angle calculation method based on front-end fusion, such as figure 2 As shown, it includes an inertial navigation module, a front-end fusion module and a positioning algorithm module. In the figure, a laser radar module is also included to provide laser data for the positioning algorithm module to calculate and process the pose data. The inertial navigation module Output the original IMU data. In this embodiment, the inertial navigation module does not include a magnetometer, that is, the inertial navigation module does not support the output heading angle, but it can still output angular velocity and linear acceleration. The positioning algorithm module is used for Computing and processing to obtain the pose data, the front-end fusion module includes a Kalman filter unit and a motion model ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More