

Table tennis serving robot capable of automatically picking up balls
A table tennis and robot technology, applied in the field of robotics, can solve the problems of affecting work efficiency, time-consuming and labor-intensive table tennis, and low intelligence, so as to save time and effort, avoid blind work, and improve work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
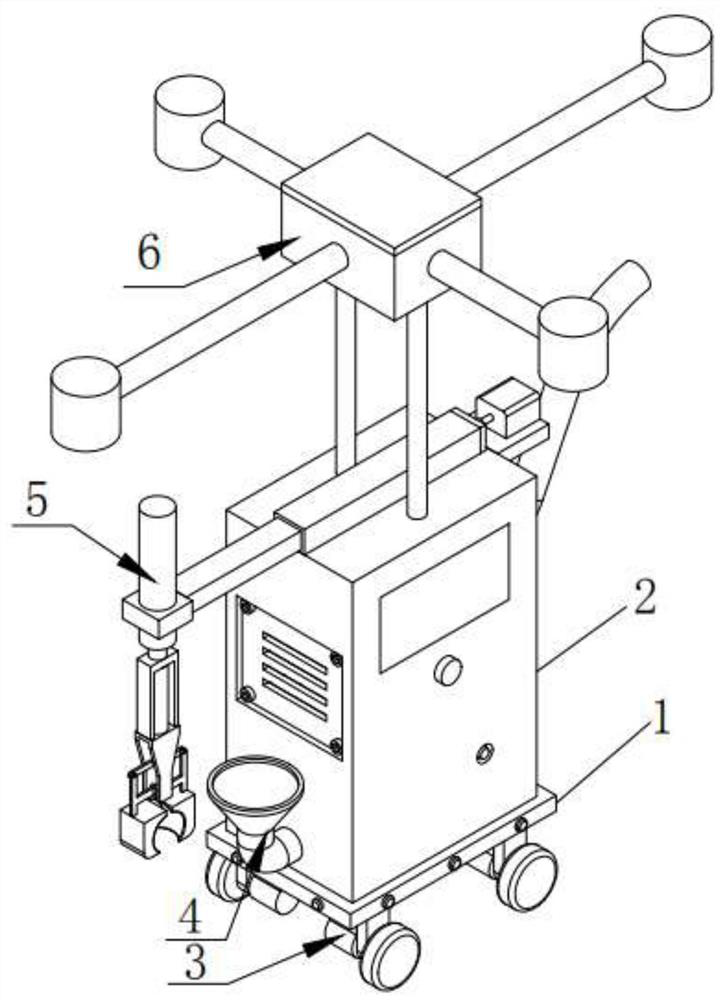
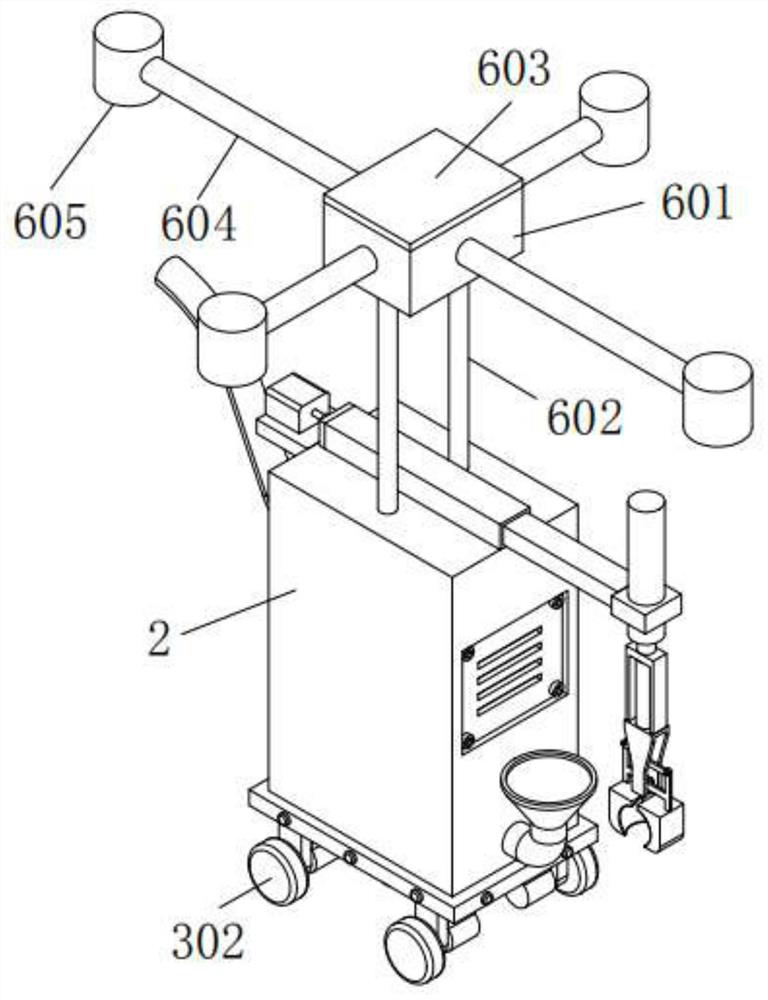
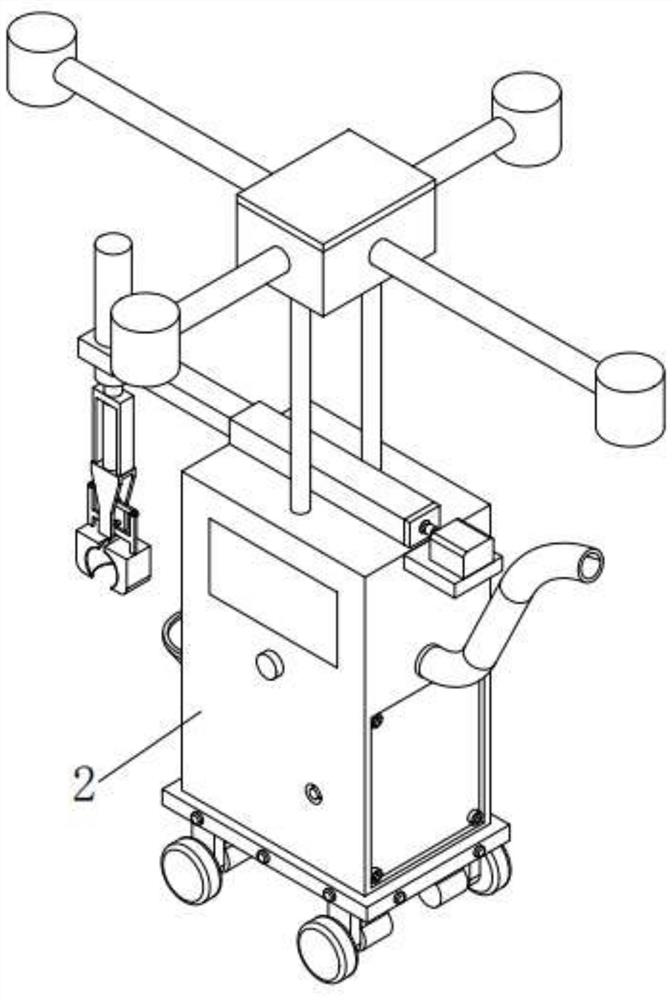
[0041] Such as Figure 1-12 As shown, a table tennis serving robot that can automatically pick up balls according to an embodiment of the present invention includes a base plate 1, a base 2, four sets of walking mechanisms 3, a ball-serving mechanism 4, a ball-picking mechanism 5, a ball-seeking mechanism 6 and a power supply Mechanism 7, the base plate 1 is arranged horizontally, the base 2 is fixedly installed on the upper part of the base plate 1, the four sets of the walking mechanisms 3 are all fixedly installed on the bottom of the base plate 1, and the four sets of the walking mechanisms The mechanism 3 is arranged symmetrically, the ball-serving mechanism 4 is arranged on the base 2 and the base plate 1, the ball-picking mechanism 5 is installed on the base 2, and the ball-picking mechanism 5 and the ball-serving mechanism Mechanism 4 is arranged in cooperation, and described ball-seeking mechanism 6 is installed on the top of described base 2, and described ball-seeki...
Embodiment 2
[0051] Such as Figure 9 As shown, the difference between this embodiment and Embodiment 1 is that the middle part of the circular shaft 810 is also fixedly fitted with a circular blocking piece 805, and the circular blocking piece 805 is located between the first connecting horizontal piece 806 and the Between the second connecting horizontal piece 811, and the circular blocking piece 805 is attached to the first connecting horizontal piece 806 and the second connecting horizontal piece 811 respectively. The above-mentioned circular blocking piece 805 can prevent the gap between the first connecting horizontal piece 806 and the second connecting horizontal piece 811 from shaking, so that the structure of the ball catching assembly 8 is relatively stable, and the performance of catching table tennis balls is better.
Embodiment 3
[0053] Such as Figure 10 and 11 As shown, the difference between the present embodiment and the second embodiment is that the notch of the fitting groove 407 is also fixed with a first side cover 411 through the first bolt 413, and the first side cover 411 is evenly opened There are several through holes 412 . The above-mentioned first side cover 411 is used to prevent the second high-pressure air pump 408 from being touched or damaged by idlers, thereby ensuring the service life of the second high-pressure air pump 408 , and several through holes 412 are used to provide air for the second high-pressure air pump 408 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More