Pneumatic control soft body bionic manipulator
A technology of manipulators and software, applied in the direction of manipulators, collets, manufacturing tools, etc., can solve the problems of poor clamping stability, difficult manipulator clamping force, low elastic stress, etc., to improve clamping strength, clamping accuracy and stability sex enhancing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
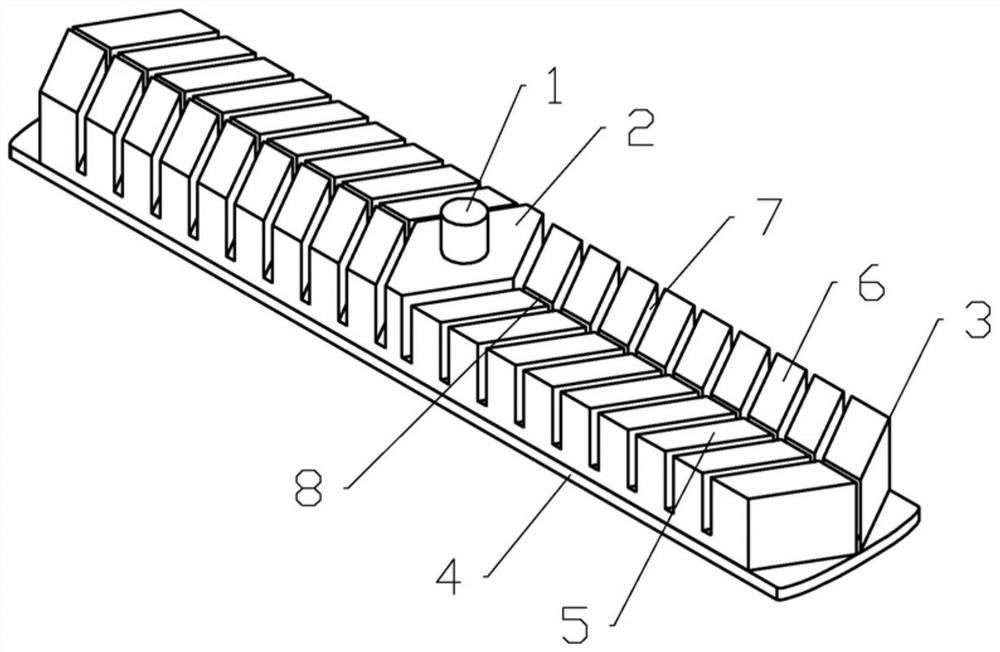
[0043] In this embodiment, the appearance design size of the soft manipulator in the uninflated state is 190mm*34mm*26.5mm, the herringbone angle between the left air chamber 5 and the right air chamber 6 is 120°, and the width of the lateral groove 7 is 1.73mm. mm, the width of the central groove 8 is 1mm, and the side length of the parallelogram air cavity is 16.17mm*4.69mm.
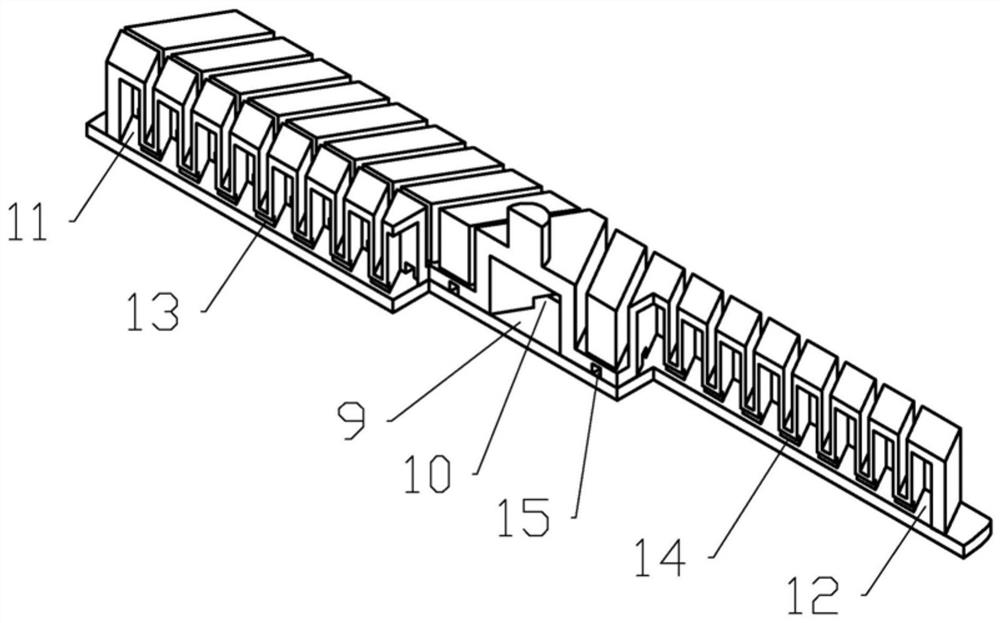
[0044] Such as Figure 6 and Figure 7 As shown in Fig. 1, the soft manipulator is simulated and modeled with finite element software, and its elastic bending deformation behavior under the set air pressure is studied. The simulation results show that when the input air pressure of the left air chamber 11 and the right air chamber 12 is set to 10kPa, the left air chamber 5 and the right air chamber 6 in the finger 3 expand simultaneously to generate circumferential and axial tension, thereby causing the substrate 4 to generate circumferential tension. and axial elastic bending deformation. When the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More