Weight-optimized dot-line comprehensive visual inertia odometer method
An odometer and weight technology, applied in the field of computer vision, can solve the problems of solution results and accuracy effects, system failures, algorithm robustness and stability effects, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
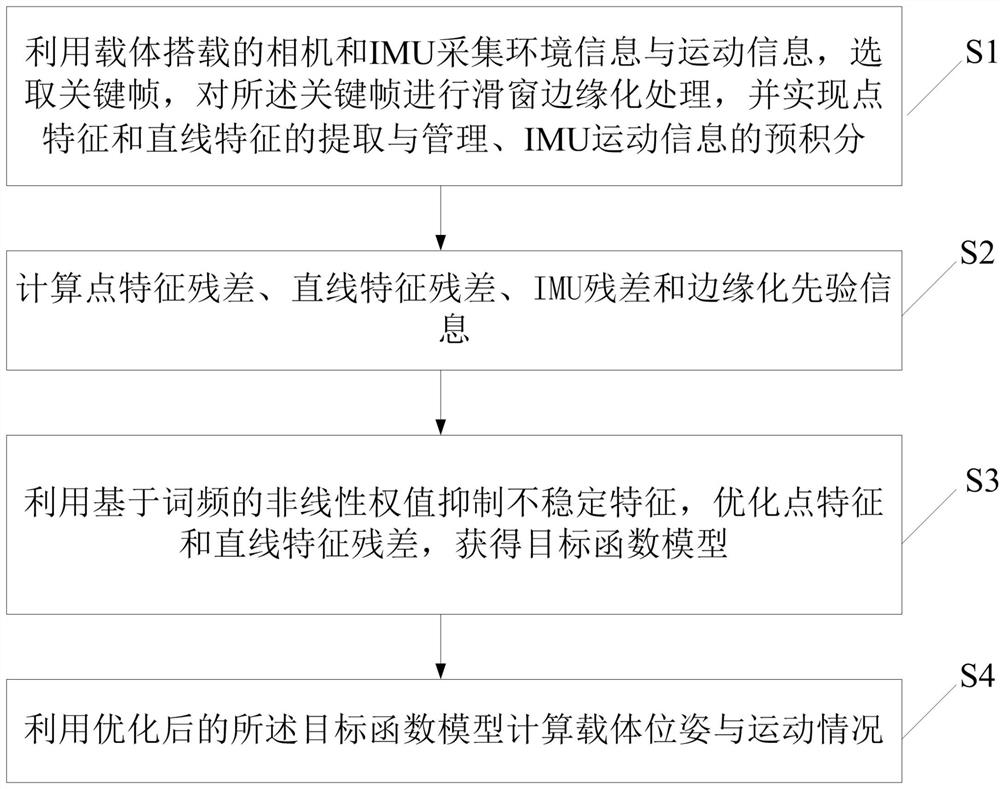
[0036] The embodiment of the present invention discloses a weight-optimized point-line comprehensive visual-inertial odometer method, such as figure 1 shown, including the following specific steps:
[0037] S1. Use the camera and IMU mounted on the carrier to collect environmental information and motion information, select key frames, perform sliding window edge processing on the key frames, and realize the extraction and managemen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More