A parallel kinematic robot
A robot and motion technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of adding weight to movable platforms, and achieve the effects of torque reduction, high performance, and large total transmission ratio.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
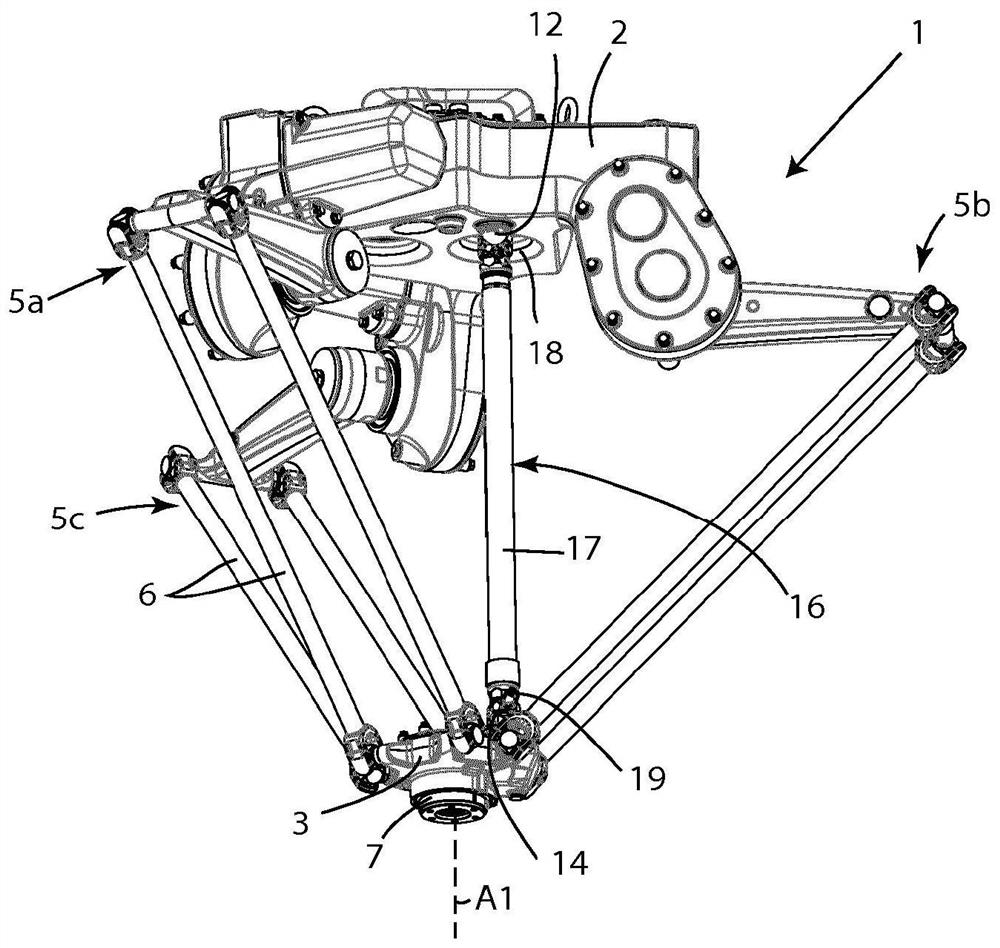
[0049] figure 1 An example of a parallel kinematic robot having four axes according to the first embodiment of the present invention is shown. The robot 1 comprises a base unit 2, a platform 3 movable relative to the base unit about a plurality of principal axes. Apart from the fourth axis and the drive of the fourth axis, the robot is a parallel kinematic robot 1 according to the prior art. Therefore, only the robot-related components of axis 1 to axis 3 are briefly described below.
[0050] The base unit 2 is designed to be fixed, eg to be suspended or attached to a roof or a wall. The platform 3 is movable relative to the base unit by means of at least two independently movable drive arms connected between the base unit and the movable platform. For parallel kinematic robots, three arms are required for the movement of the three-degree-of-freedom platform. In this example, the robot has three arms 5a to 5c arranged to move the platform about three axes. Each arm includ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap