

Non-fragile optimal control method for Lipschitz nonlinear system
A nonlinear system, optimal control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of uncertainty, system control performance impact, poor non-fragility, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] The present invention will be further explained below in conjunction with the accompanying drawings.
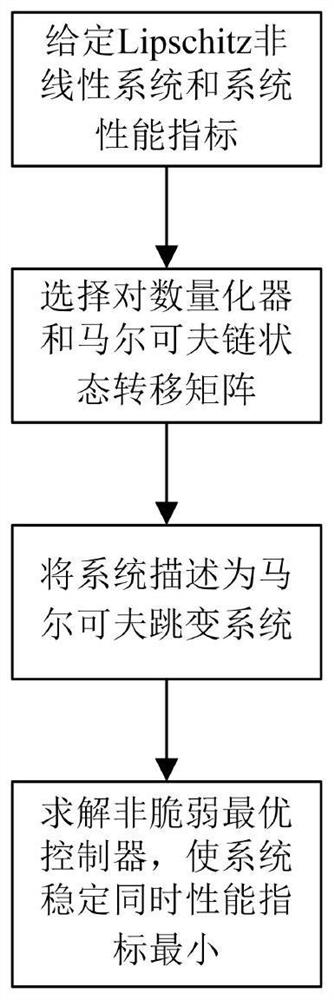
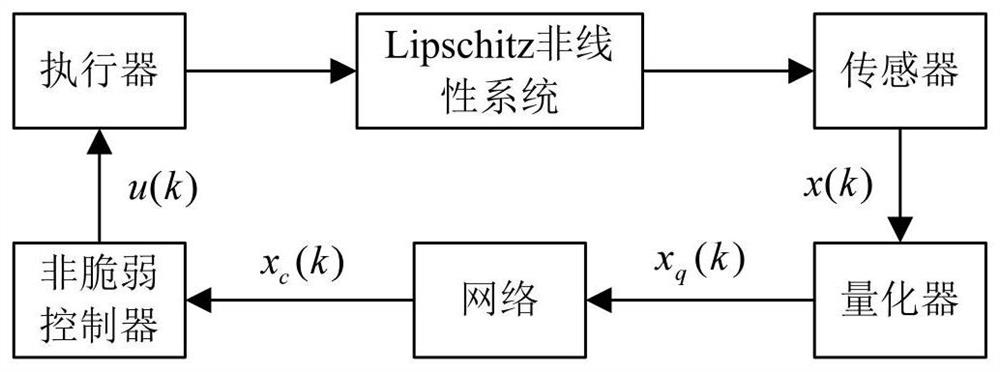
[0048] like figure 1 and figure 2 Shown, are respectively the flow chart and the structural diagram of the non-fragile optimal control of Lipschitz nonlinear system, the non-fragile optimal control method of a kind of Lipschitz nonlinear system of the present invention, comprises the following steps:
[0049] 1) The sensor samples the state of the Lipschitz nonlinear system with model uncertainty, converts it into a digital quantity with a logarithmic quantizer, and transmits it to the remote controller;
[0050] 2) Quantified data may be lost due to network congestion or interference during transmission to the controller. The Markov chain is used to describe the data transmission process, and the controller adopts corresponding control strategies according to the received data;
[0051] 3) The closed-loop system is described as a Markovian jump system. Based on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More