

Mobile robot environment map construction method and system and storage medium
A mobile robot, environmental map technology, applied in control/regulation systems, radio wave measurement systems, instruments, etc., can solve the problems of redundant coverage, slow environmental space, and no balance between benefits and costs, and achieves a reduction in redundant coverage. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
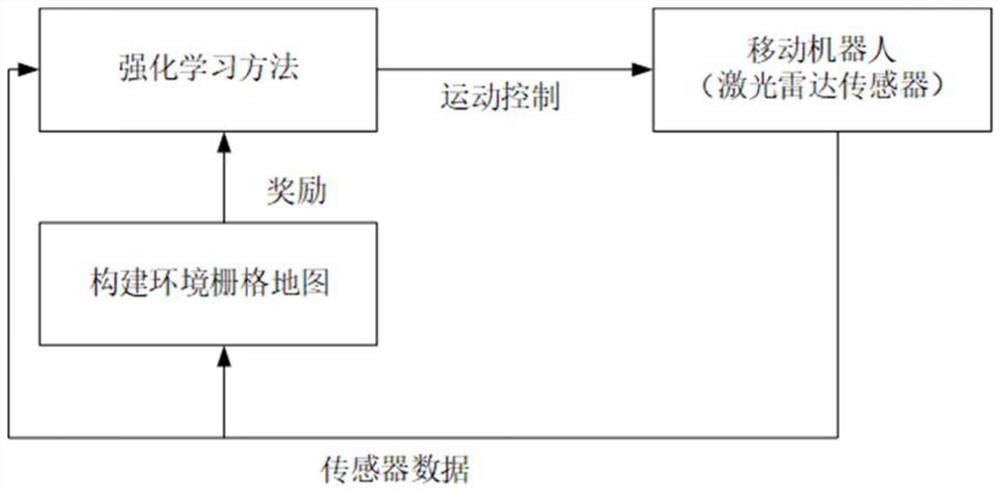
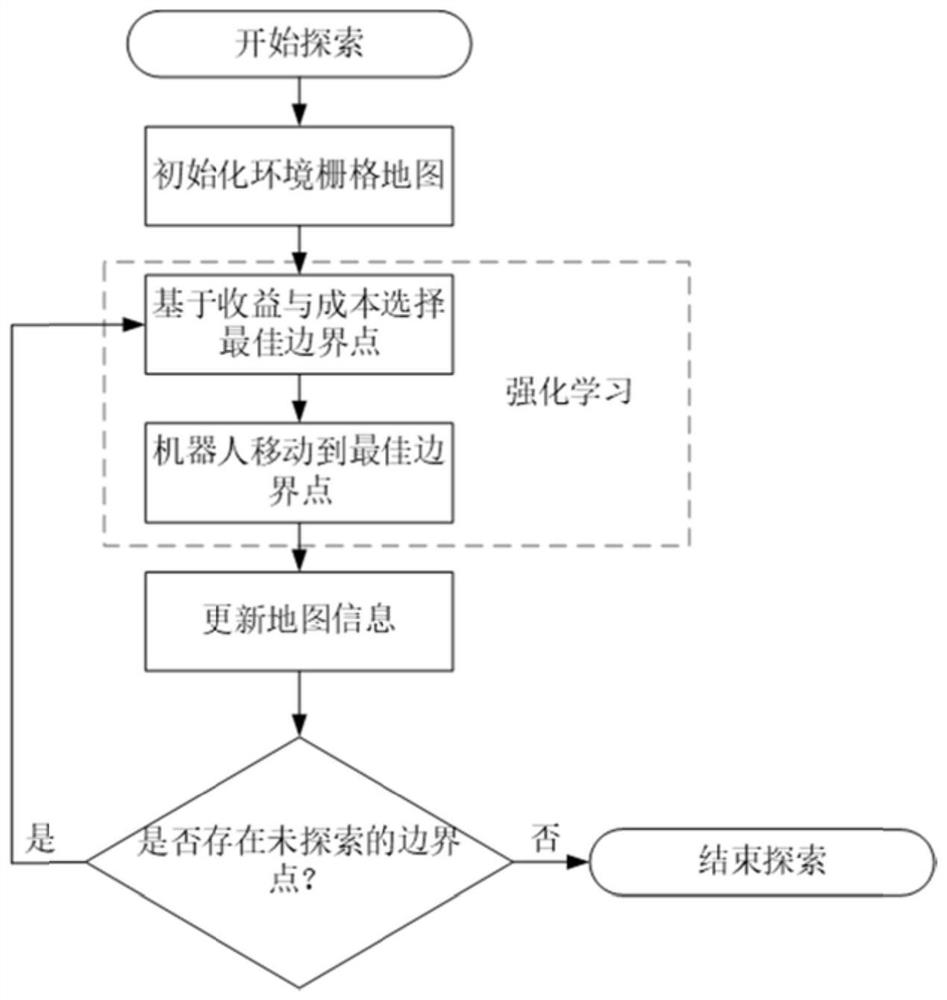
[0034] The purpose of the present invention is to provide a method for a mobile robot to use deep reinforcement learning to build a map autonomously in an unknown environment, such as figure 2As shown, it obtains perception data from the environment through its own lidar sensor, and then constructs a two-dimensional grid map of the environment from the known sensor data, and uses a boundary-based method to detect the gap between free space and unexplored space. The boundary point, and then select an optimal boundary point from all the current boundary points based on the income and cost. The optimal boundary point is the target position of the robot's movement, and then use the deep reinforcement learning method to control the robot to realize the autonomous obstacle avoidance of the mobile robot The navigation moves to the boundary point, obtains new environmental information, and performs a new round of mapping. This process is repeated until there are no boundary points in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More