AUV recovery docking dynamic positioning control method based on model predictive control
A model predictive control and dynamic positioning technology, applied in the field of robotics, can solve problems such as difficult to ensure dynamic positioning control accuracy, low dynamic positioning accuracy, and affect the dynamic positioning effect, so as to improve the accuracy of state estimation and the accuracy of state estimation results. The effect of good approximation ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
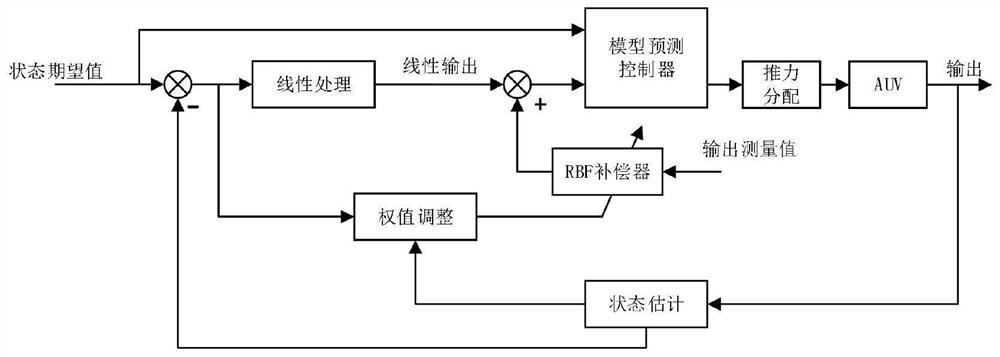
[0056] Such as figure 1 As shown: the AUV recovery and docking dynamic positioning control method based on model predictive control of the present invention has several processes of setting state expectation value, state estimation, linear processing, RBF neural network compensator, model predictive controller design, and thrust distribution. Among them, the state expectation value input is used as the input of the entire dynamic positioning control system, and the AUV system state estimation is used as the feedback. The state estimation result is compared with the expected value to complete the error calculation, and the result is linearly processed and the RBF compensator design is input. To the model predictive controller, the control quantity is finally calculated and the thrust distribution is completed.
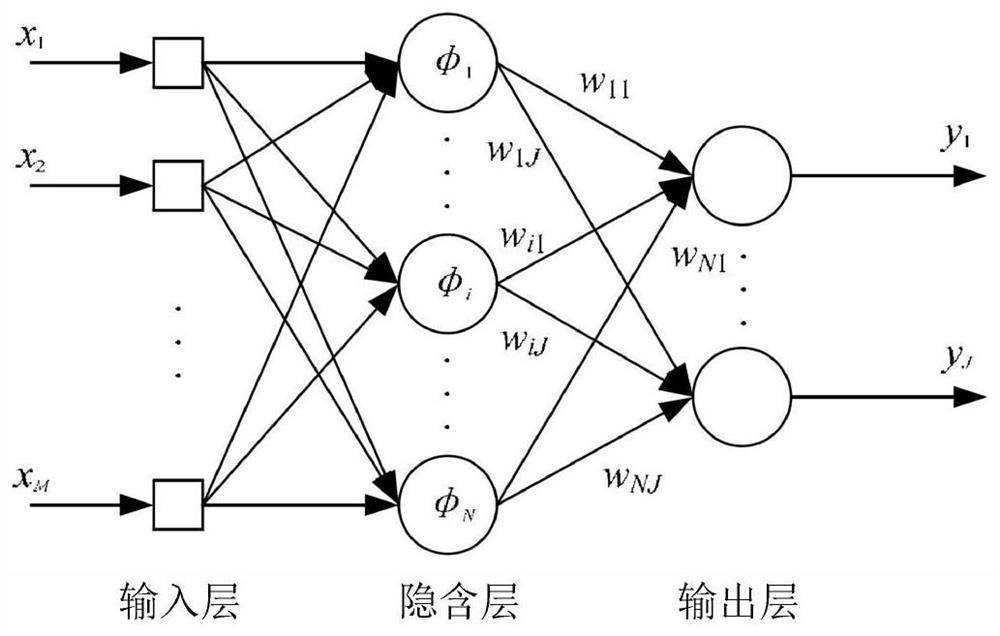
[0057] The RBF neural network co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More