

A multi-degree-of-freedom variable-stiffness joint manipulator
A technology of variable stiffness and manipulators, applied in manipulators, program-controlled manipulators, claw arms, etc., can solve problems such as poor safety, achieve the effects of improving bearing capacity, fast response to stiffness adjustment, and eliminating additional bending moments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
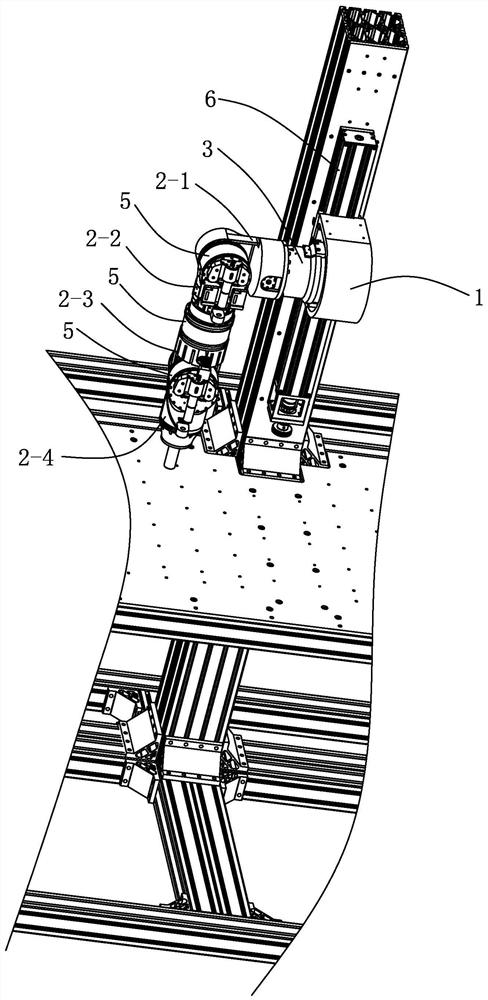
[0036] see Figure 1-Figure 4 , Figure 13 and Figure 14 As shown, a multi-degree-of-freedom variable stiffness articulated manipulator in this embodiment includes a mounting base 1, a base joint 3, three end joints 5 and four connecting rods;
[0037] The mounting base 1 is installed on the existing linear slide table 6, the input end of the base joint 3 is connected with the mounting base 1, the output end of the base joint 3 is connected with the first connecting rod 2-1, and the first connecting rod 2-1 It is connected with the input end of the first end joint 5, the output end of the first end joint 5 is connected with the second connecting rod 2-2, and the second connecting rod 2-2 is connected with the input end of the third end joint 5, The output end of the third end joint 5 is connected to the third connecting rod 2-3, the third connecting rod 2-3 is connected to the input end of the fourth end joint 5, and the output end of the fourth end joint 5 is connected to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More