

Multi-degree-of-freedom variable-rigidity joint mechanical arm
A technology of variable stiffness and manipulators, applied in manipulators, program-controlled manipulators, claw arms, etc., can solve problems such as poor safety, and achieve the effects of improving bearing capacity, fast response to stiffness adjustment, and low energy consumption for stiffness adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
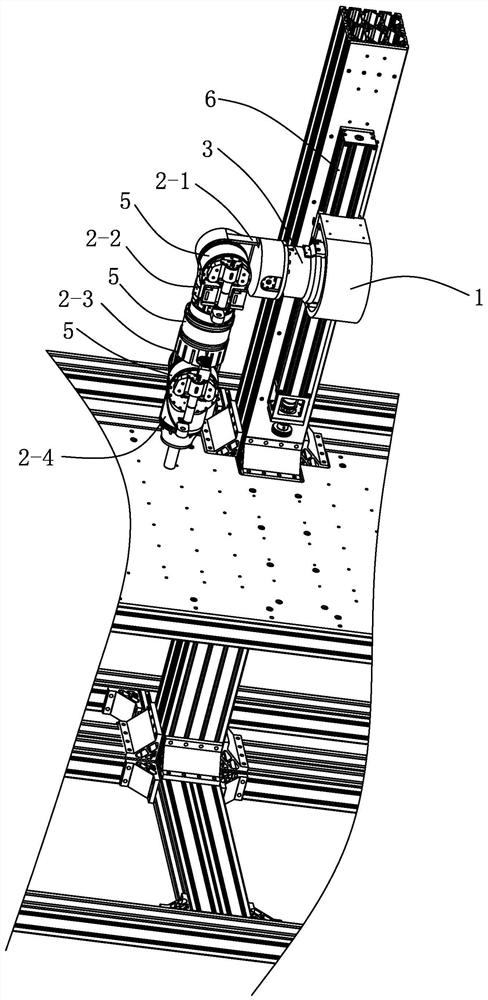
[0036]SeeFigure 1-Figure 4 ,Figure 13 withFigure 14 As shown, a multi-degree-of-freedom variable-rigidity joint mechanical arm of this embodiment includes a mounting seat 1, a base joint 3, three end joints 5, and four connecting rods;
[0037]The mounting base 1 is installed on the existing linear sliding table 6, the input end of the base joint 3 is connected to the mounting base 1, and the output end of the base joint 3 is connected to the first link 2-1, the first link 2-1 Connected to the input end of the first end joint 5, the output end of the first end joint 5 is connected to the second link 2-2, and the second link 2-2 is connected to the input end of the third end joint 5, The output end of the third end joint 5 is connected to the third link 2-3, the third link 2-3 is connected to the input end of the fourth end joint 5, and the output end of the fourth end joint 5 is connected to the fourth link. Connecting rod 2-4 connection;
[0038]The four links are the first link 2-1, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More