

Driving wheel rotating speed control method and system
A speed control and drive wheel technology, applied in the direction of control drive, control devices, electric vehicles, etc., can solve the problems of differential damage, ablation, and unresolved problems, so as to avoid damage and ablation and improve maneuverability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
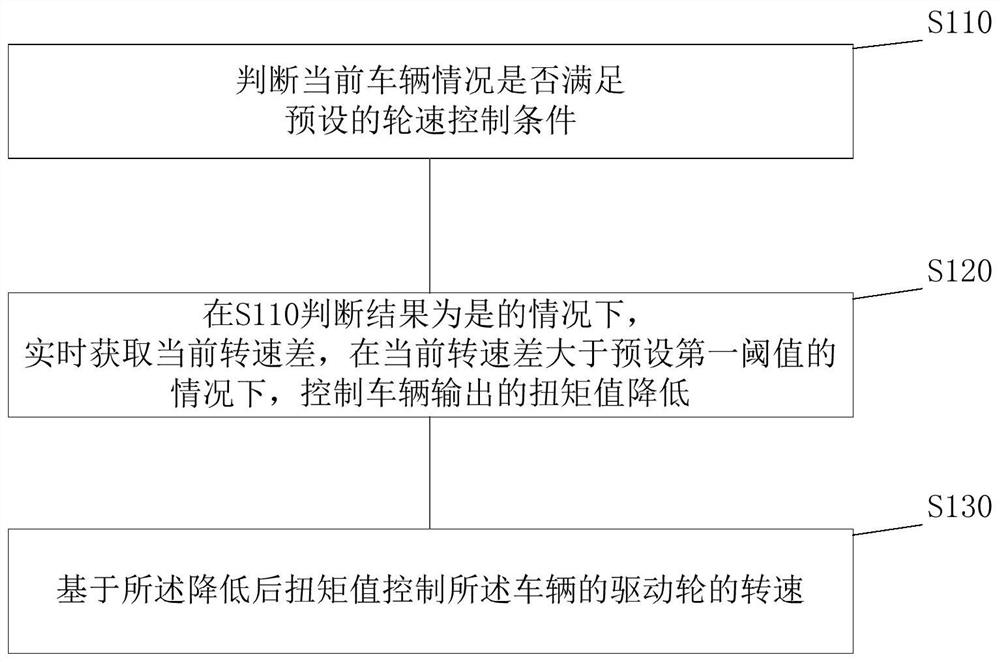
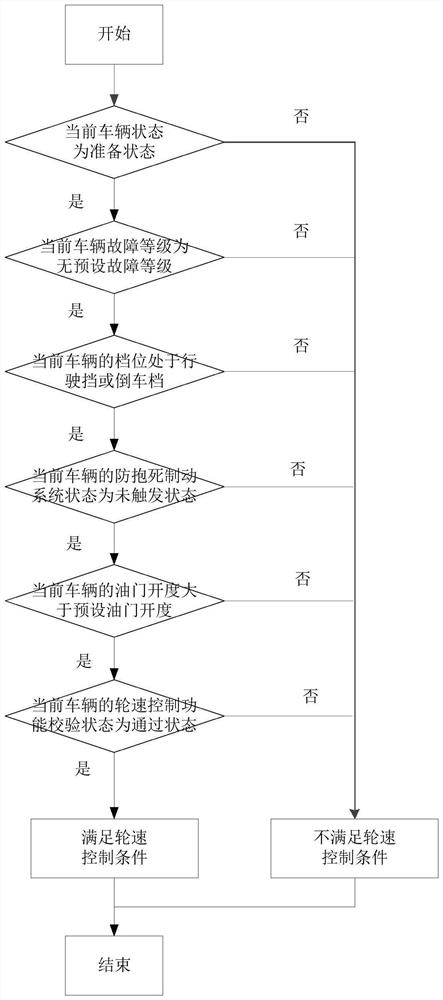
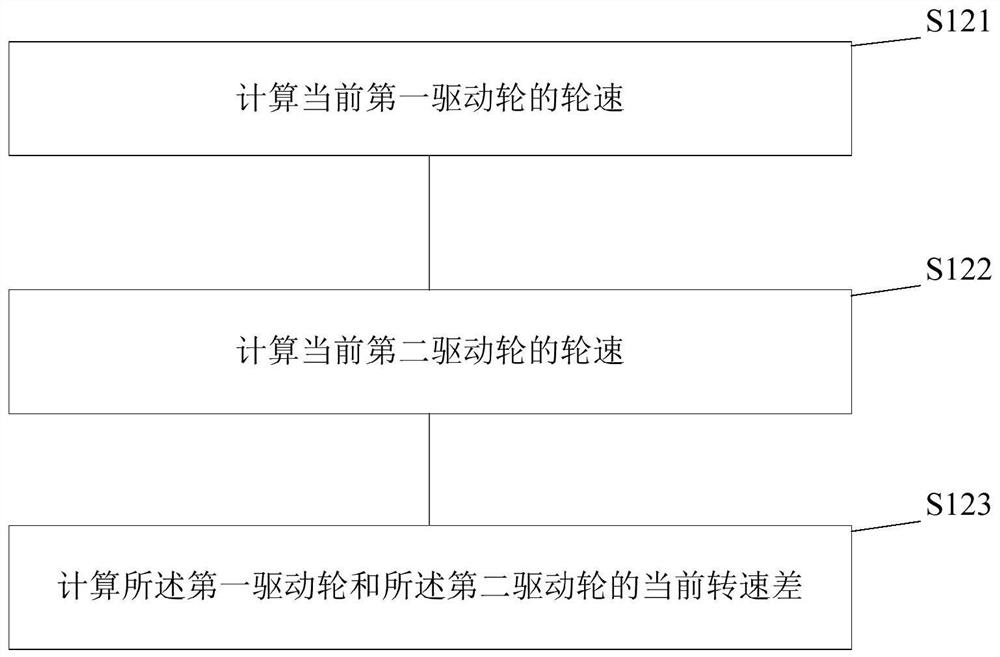
[0036] Figure 1a It is a flow chart of the method for controlling the speed of the driving wheel in Embodiment 1, which mainly describes how to control the speed of the driving wheel to avoid damage to the differential caused by continuous increase of the speed of the driving wheel in the case of unilateral slippage. Figure 1b It is the judging method of the wheel speed control condition in the first embodiment. Figure 1c It is the calculation method of the rotational speed difference of the two driving wheels in the first embodiment.
[0037] Such as Figure 1a As shown, the present invention also provides a driving wheel speed control method, and the driving wheel speed control method may include:
[0038] S110, judging whether the current vehicle condition satisfies a preset wheel speed control condition.
[0039] Wherein, the preset wheel speed control conditions can be adjusted according to actual conditions, and the corresponding current vehicle conditions will also ...
Embodiment 2
[0059] figure 2 It is the flowchart of the second embodiment, wherein the second embodiment is a further improvement made on the basis of the first embodiment. Specifically, a further improvement is made on "controlling the reduction of the torque value output by the vehicle" in the first embodiment. The improved solution mainly involves two steps, which are specifically described as follows. image 3 It is the specific flow chart of "calculating the target torque value". Figure 4 It is a specific flowchart of "controlling the torque value output by the vehicle to decrease to the target torque value".
[0060] S210, calculating a target torque value.
[0061] Wherein, the manner of calculating the target torque value may include the following S211-S213. S211-S213 will be used for specific description below.
[0062] S211, according to the preset first compensation ratio table recording the correspondence between the rotation speed difference and the first torque coeffic...
Embodiment 3
[0084] Embodiment 3 is a further improvement made on the basis of Embodiment 2, which mainly includes when the current speed difference is greater than the preset first threshold (marking that the vehicle is in or tends to one-sided slipping state) , to control the situation after the torque value output by the vehicle is reduced. Embodiment 3 mainly includes two possible situations, as described below. in, Figure 5 It is a specific flow chart for further improvement of the case 1 of the third embodiment "controlling the output torque value of the vehicle to change to the required torque value of the vehicle";
[0085] Case 1: When the current rotational speed difference is less than a preset second threshold (marking that the vehicle is not in or tends to one-side slipping state), control the output torque value of the vehicle to change to the required torque value of the vehicle.
[0086] Wherein, in the first case, the current rotational speed difference is collected in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More