

Multi-platform point cloud matching method based on surface features
A point cloud matching, multi-platform technology, applied in image data processing, instrumentation, computing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0062] Below in conjunction with specific embodiment the present invention is described in further detail:
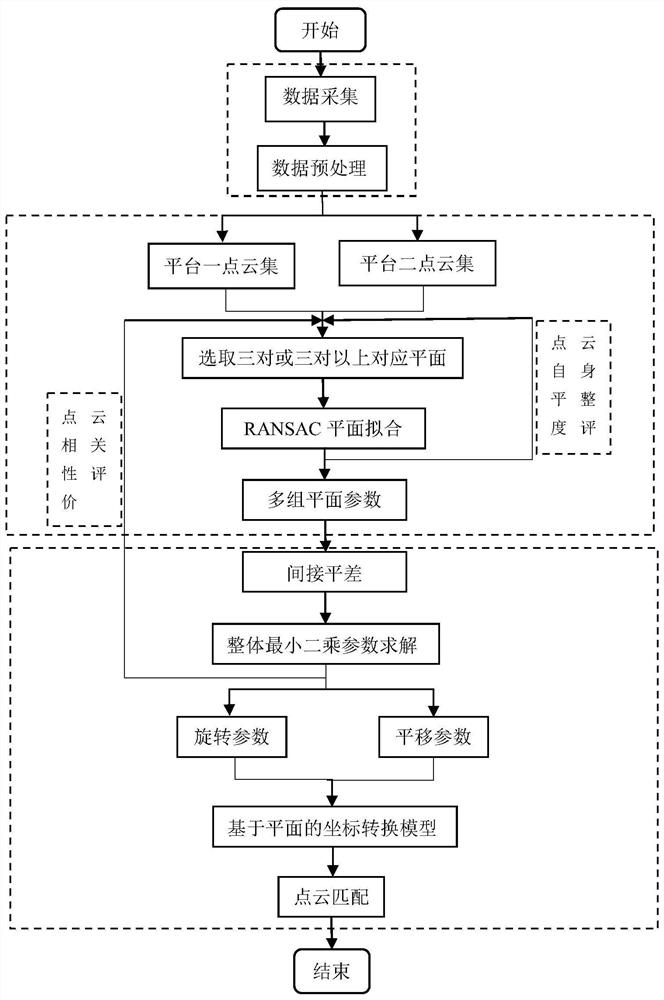
[0063] A multi-platform point cloud matching method based on surface features, the technical flow chart is as follows figure 1 shown, including the following steps:
[0064] S1. Collect the ground objects in the target area through the data acquisition equipment set up on different platforms, obtain the original point cloud data under different platforms and perform preprocessing;
[0065] S2. Through human-computer interaction, three or more pairs of non-coplanar matching planes are uniformly selected from the preprocessed point cloud data, and the robust RANSAC algorithm is used to perform plane fitting and extract the parameters of the common plane. Self-flatness evaluation of planar point cloud;
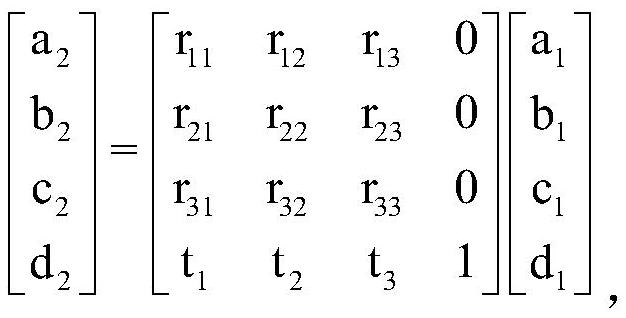
[0066] S3. Based on the plane parameters of three or more pairs of corresponding planes, parameterize the rotation into a nonlinear model, perform linearization processi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More