Football robot ball-carrying strategy selection method based on reinforcement learning
A football robot and reinforcement learning technology, applied in the field of football robot dribbling strategy selection based on reinforcement learning, to achieve the effects of improving running speed, fast dribbling process, and reducing memory and computing units
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0057] This embodiment takes the omnidirectional walking Nao robot used by the RoboCup standard platform group as an example to illustrate the reinforcement learning-based football robot dribbling strategy selection method proposed by the present invention. The method specifically includes the following steps:
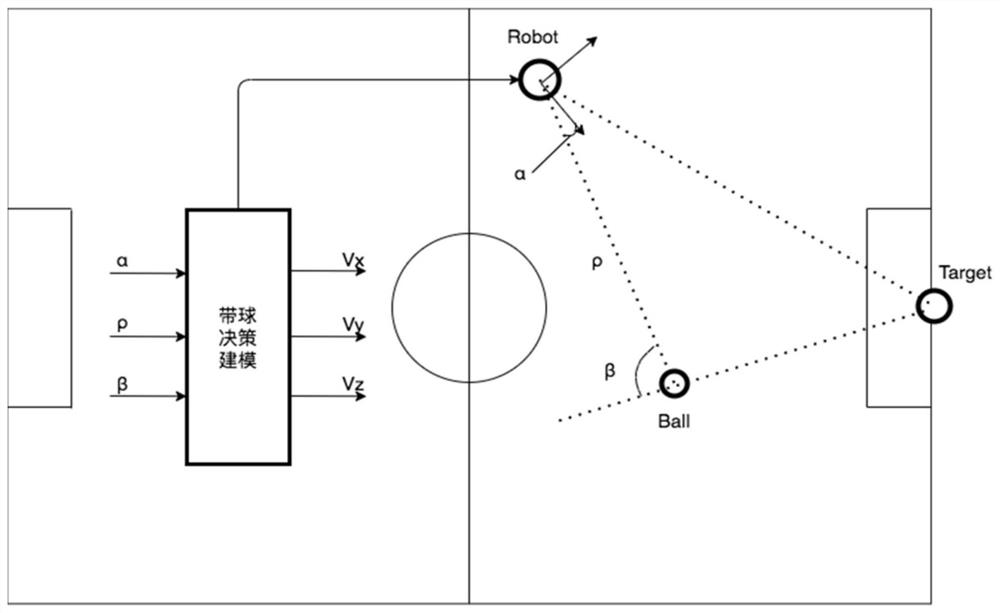
[0058] The first step is to establish the robot-ball-target position model
[0059] At present, most of the relevant research is to establish the state space by dividing the stadium. Such a huge state space requires a large amount of memory and computing units. The present invention models local behavior using angle and distance values. Such as figure 1 As shown, taking robot-ball angle α, robot-ball distance ρ, and robot-ball-target angle supplementary angle β as state parameters, the velocity vector [V x ,V y ,V z ] is the action parameter, V x , V y , V z Represent the speed of the robot's movement in three dimensions, with the player taking the ball to the e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com