

Balance weight adjusting structure and method for self-walking equipment
A technology for adjusting the structure and self-propelling, which is applied in the directions of vehicle body, body stability, transportation and packaging, etc., which can solve the problems of easy tipping, downward tipping, and backward tipping, etc., so as to prevent the rear wheels from slipping and lower the effect of possibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
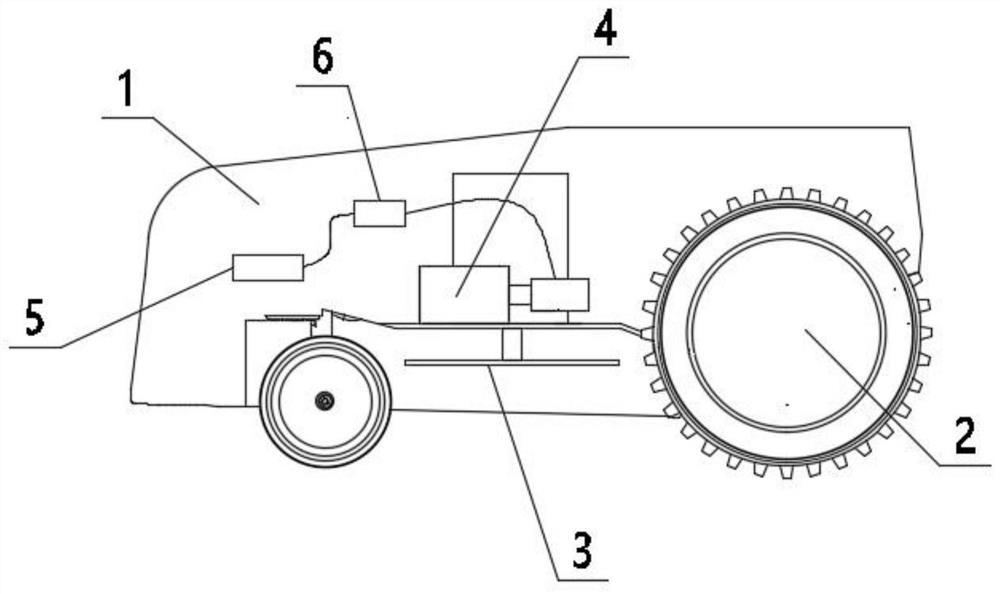
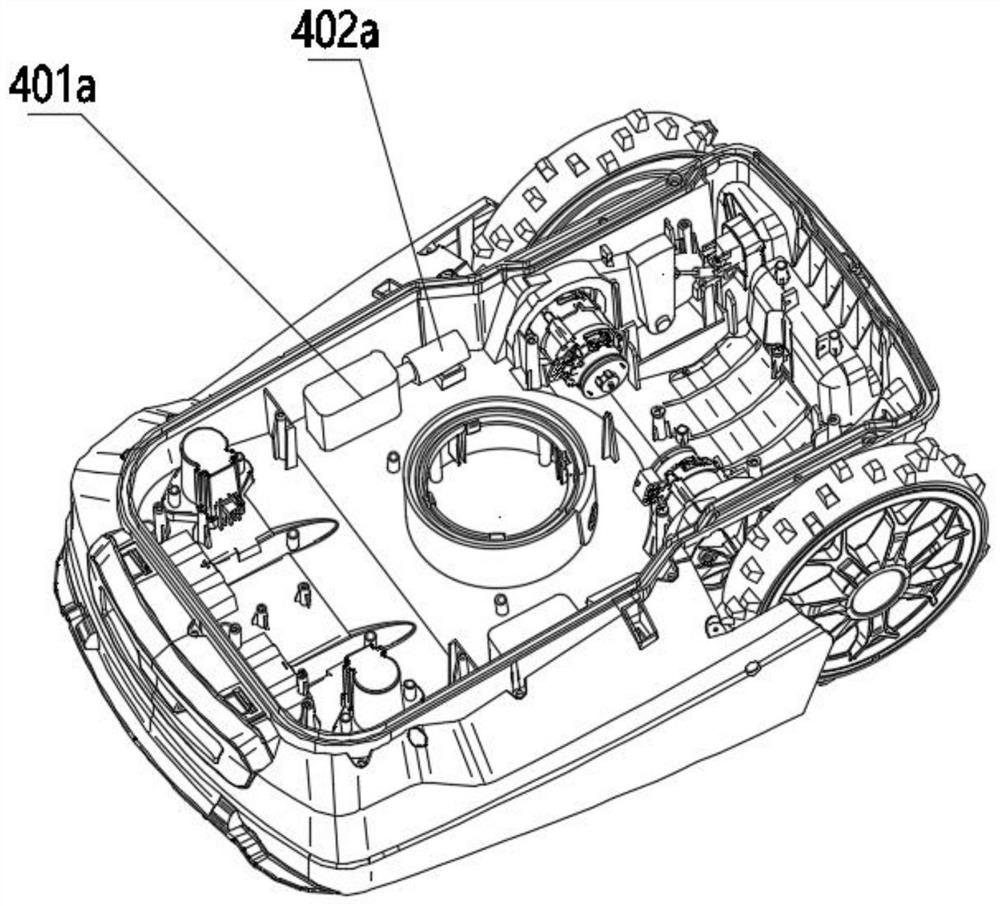
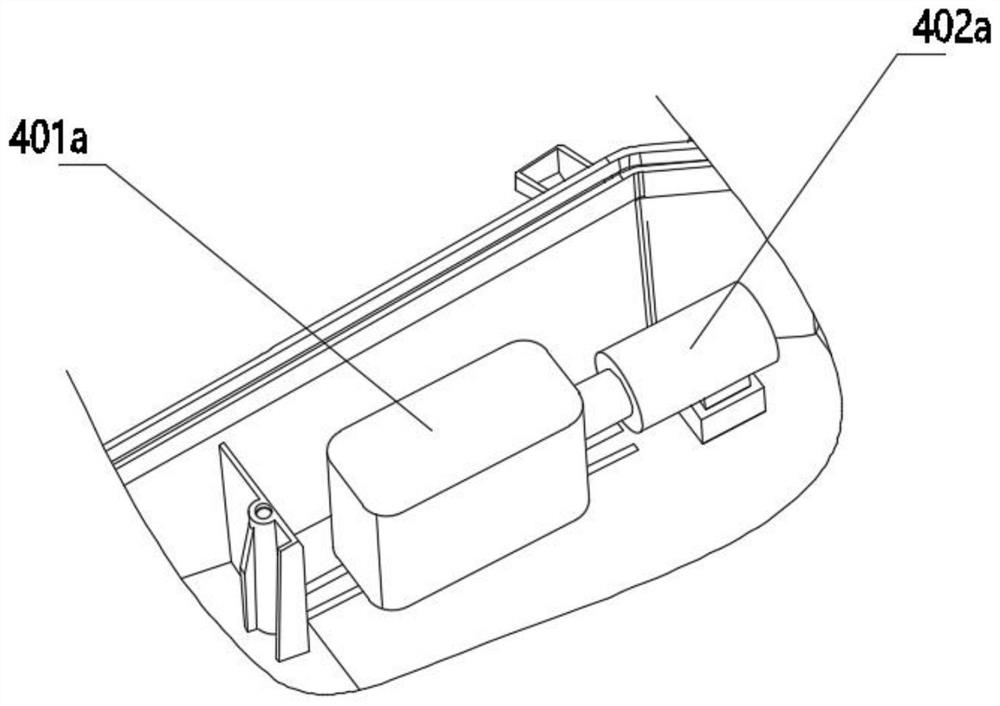
[0039] Such as figure 1 and 2 A lawnmowing robot shown includes a body 1, a drive unit, a cutting unit 3 and a main control unit 6; the drive unit includes a drive wheel 2 driven by a power device. The fuselage 1 is provided with a counterweight adjustment mechanism 4, and the counterweight adjustment mechanism 4 includes a counterweight 401a and a moving part 402a, such as image 3 As shown, the moving part 402a is a hydraulic push rod, which can push the counterweight 401a to move forward and backward. In actual use, when the lawn mowing robot is on a flat road, the counterweight 401a is in the first position, and when the lawn mowing robot is in an uphill state, such as Figure 4 As shown, the counterweight 401a moves to the second position under the drive of the moving part 402a, and the second position is closer to the head of the robot than the first position, so that the center of gravity of the entire lawn mowing robot moves forward, and the center of gravity after t...
Embodiment 2
[0045] Such as Figure 6As shown in the lawn mowing robot, the body 1 is provided with a counterweight adjustment mechanism, the counterweight adjustment mechanism includes a counterweight 401b and a moving part 402c, one end of the counterweight 401b is connected to the body 1, and the moving part 402c is an electric push rod , the counterweight 401b can rotate driven by the moving part 402c, and when the counterweight 401b rotates, the position of its center of gravity changes. Such as Figure 6 As shown, when the mowing robot is on a flat road, the center of gravity of the counterweight 401b is located directly above the rear wheel axis. Such as Figure 7 and 8 As shown, when the mowing robot is on an uphill slope, the counterweight 401b rotates under the push of the moving part 402c, and the center of gravity of the counterweight 401b remains directly above the rear wheel axis.
[0046] The moving parts can also be other structures that can drive objects to rotate, suc...
Embodiment approach
[0052] Such as Figure 6 As shown in the lawn mowing robot, the body 1 is provided with a counterweight adjustment mechanism. The counterweight adjustment mechanism includes a counterweight and moving parts. One end of the counterweight is connected to the body 1. The moving part is an electric push rod. The counterweight can be Driven by the moving parts to rotate, the hinge point of the counterweight and the fuselage 1 is located on the axis of the rear wheel, the counterweight is a symmetrical structure, and its center of gravity is located on the central axis. The counterweight adjustment method based on the above structure is as follows:
[0053] 1. The self-propelled device is equipped with an angle sensor 5 to detect the pitch angle of the fuselage 1;
[0054] 2. When the pitch angle of the self-propelled equipment is 0, the center of gravity of the counterweight is directly above the axis of the rear wheel;
[0055] 3. The moving parts drive the counterweight to rota...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More