

Robot, motion coordination method thereof, control device and readable storage medium
A motion coordination and control device technology, applied in the field of robotics, can solve the problems of uncoordinated foot movement of running precision robots, and achieve the effect of improving motion coordination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
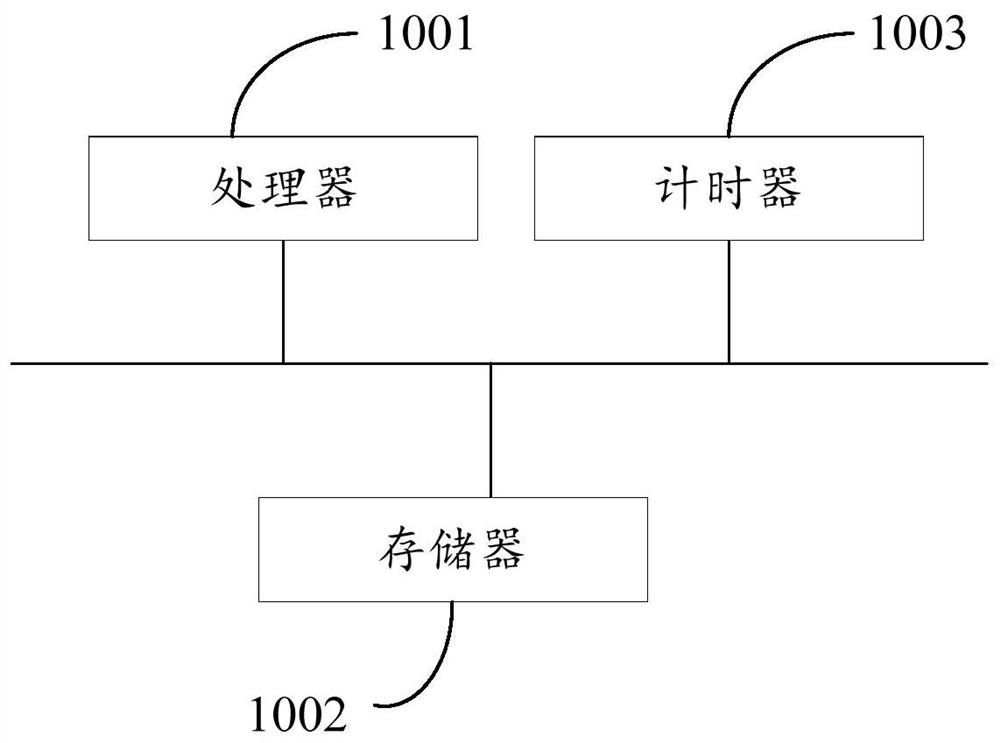
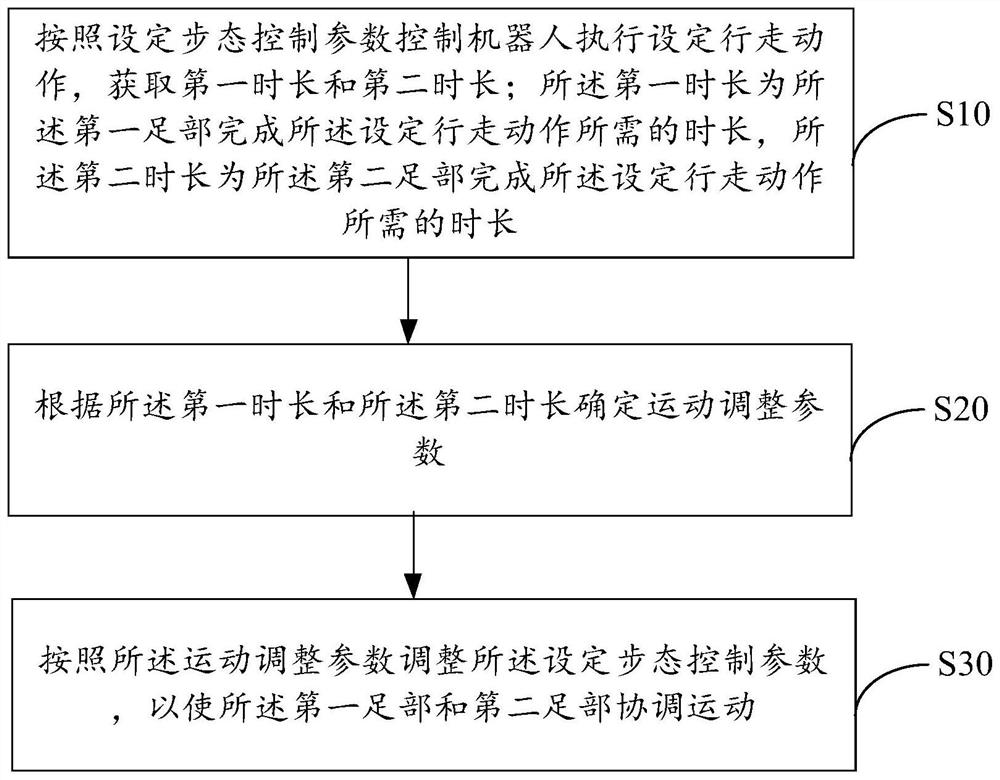
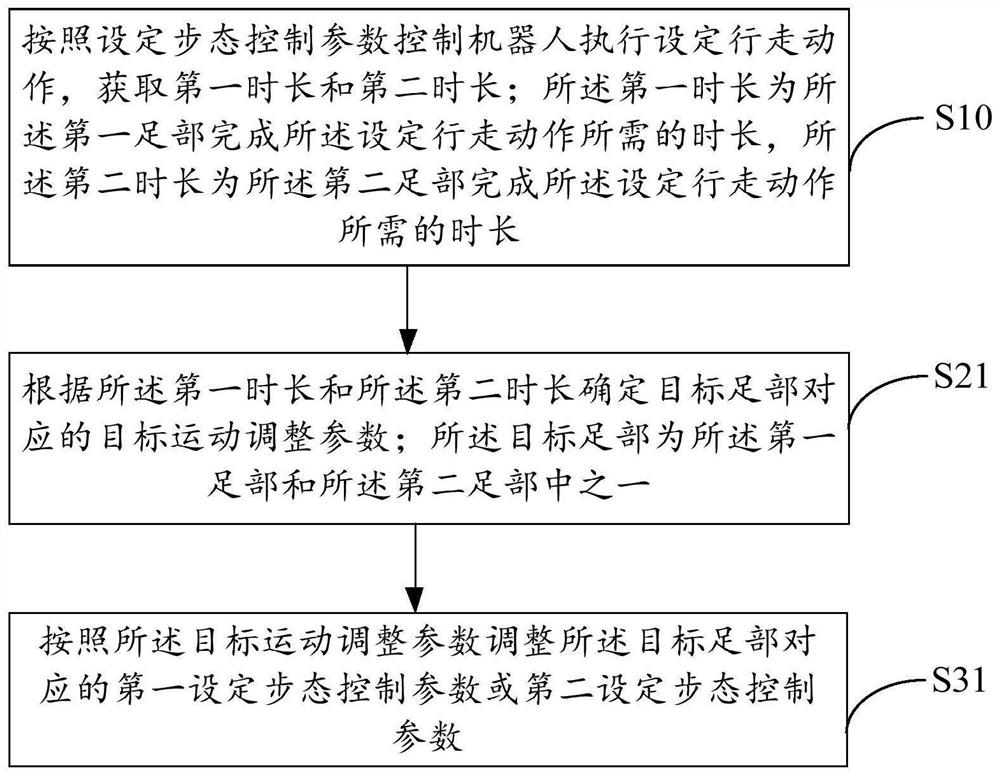
[0048] The main solution of the embodiment of the present invention is: control the robot to perform the set walking action according to the set gait control parameters, and obtain the first duration and the second duration; the first duration is when the first foot completes the setup. Set the duration required for the walking action, the second duration is the duration required for the second foot to complete the set walking action; determine the motion adjustment parameters according to the first duration and the second duration; according to The motion adjustment parameter adjusts the set gait control parameter to coordinate movement of the first foot and the second foot.
[0049] In the prior art, each degree of freedom of the robot currently requires a DC servo motor to drive, and different feet use different se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More