

A plantar wheel-driven self-balancing powered exoskeleton for patients with spinal cord injuries
A spinal cord injury and exoskeleton technology, applied in the field of medical devices, can solve problems such as the incoordination of human-machine movement in motion balance ability, and achieve the effect of reducing weight and size, fast motion balance, low power consumption and torque requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
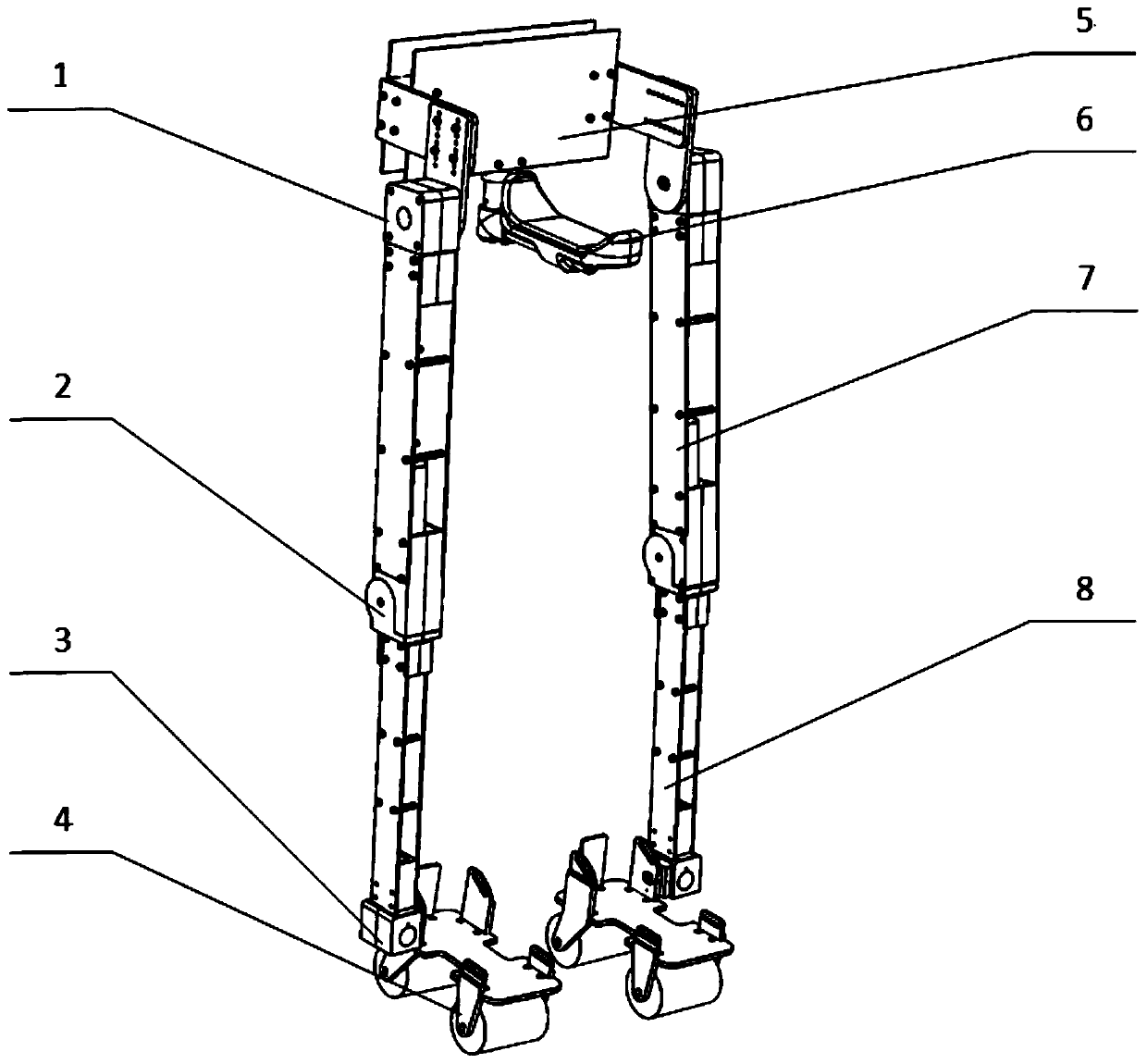
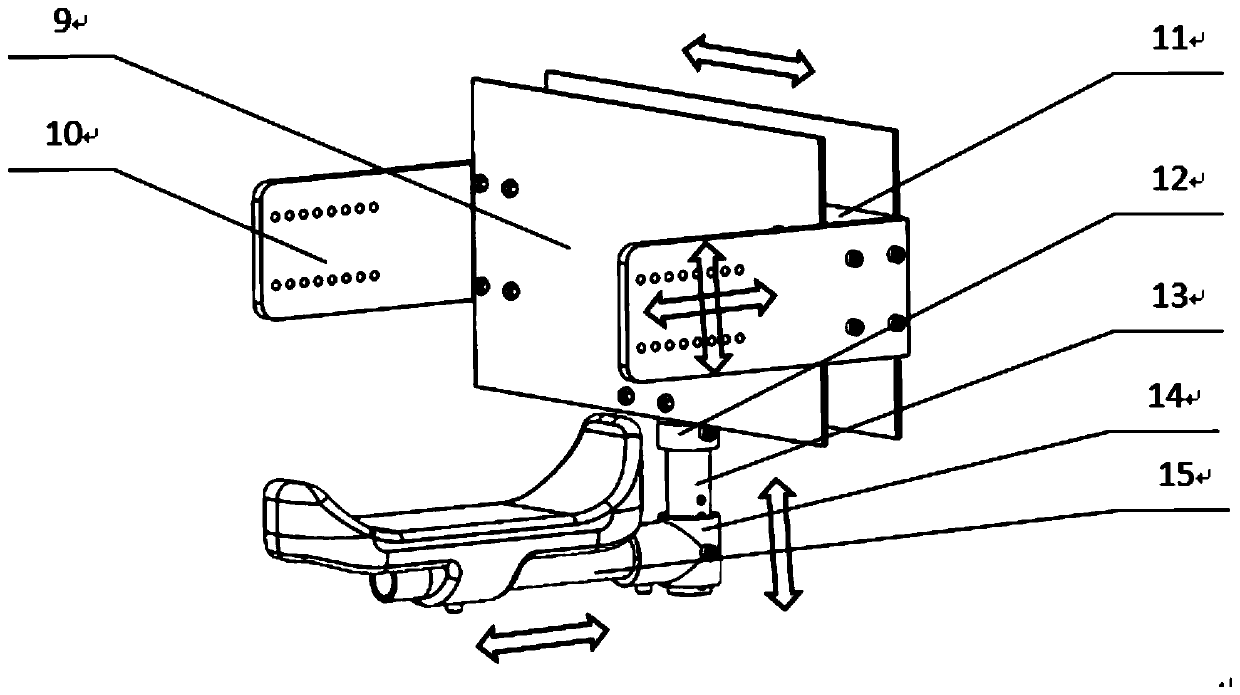
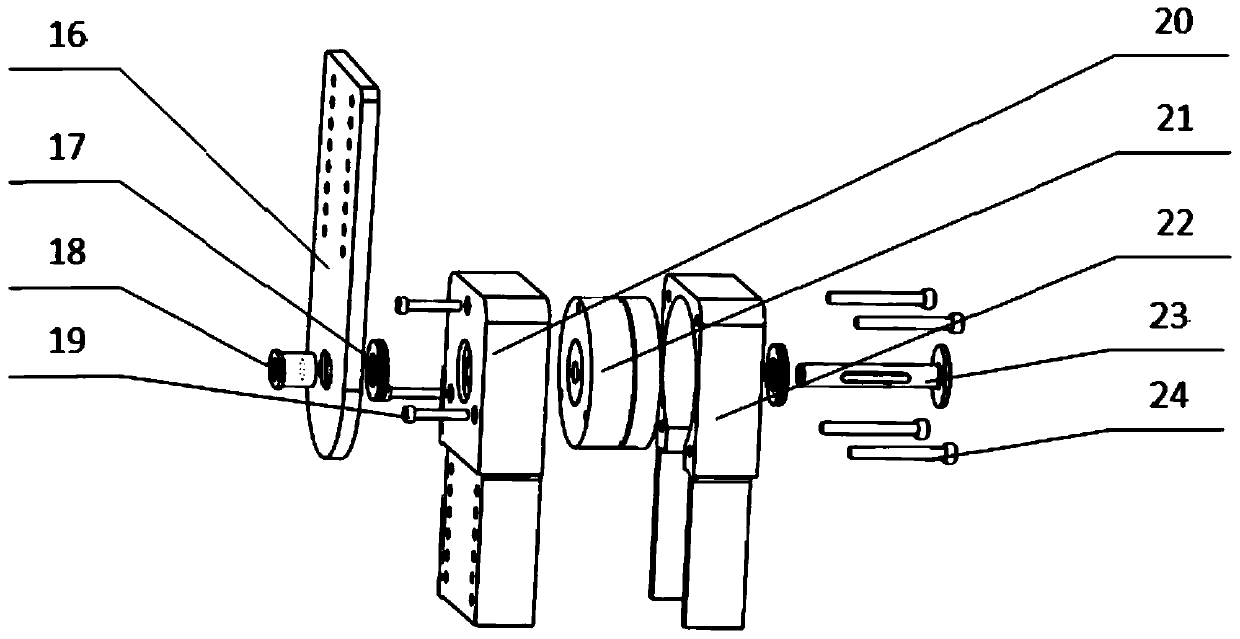
[0032] The invention adopts the plantar wheel driver and the joint driver to realize the kinematics and dynamics balance of the sagittal plane under the condition of no crutch support. The 2-1-1 mechanical degree of freedom design is adopted, that is, the ankle joint has one rotational degree of freedom in the sagittal plane and the coronal plane, the knee joint has one rotational degree of freedom in the sagittal plane, and the hip joint has one rotational degree of freedom in the sagittal plane. The coronal plane mapping length between the two legs can be changed by different joint rotation angles between the two leg joints, so as to realize the kinematics and dynamic balance of the exoskeleton on the coronal plane when the road surface is uneven or other disturbances. The exoskeleton adopts a weight support design, with adjustable cushions installed on the pelvis, and energy storage elements on the joints, which can transmit the body's weight to the ground, and effectively r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More