

Rope-driven large-motion-range flexible bionic ball socket joint
A rope-driven, ball-and-socket joint technology, applied in the field of robotics, can solve the problems of insufficient compact structure and small range of motion, and achieve the effects of convenient transportation and carrying, reducing the weight of the arm, and reducing the moment of inertia.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
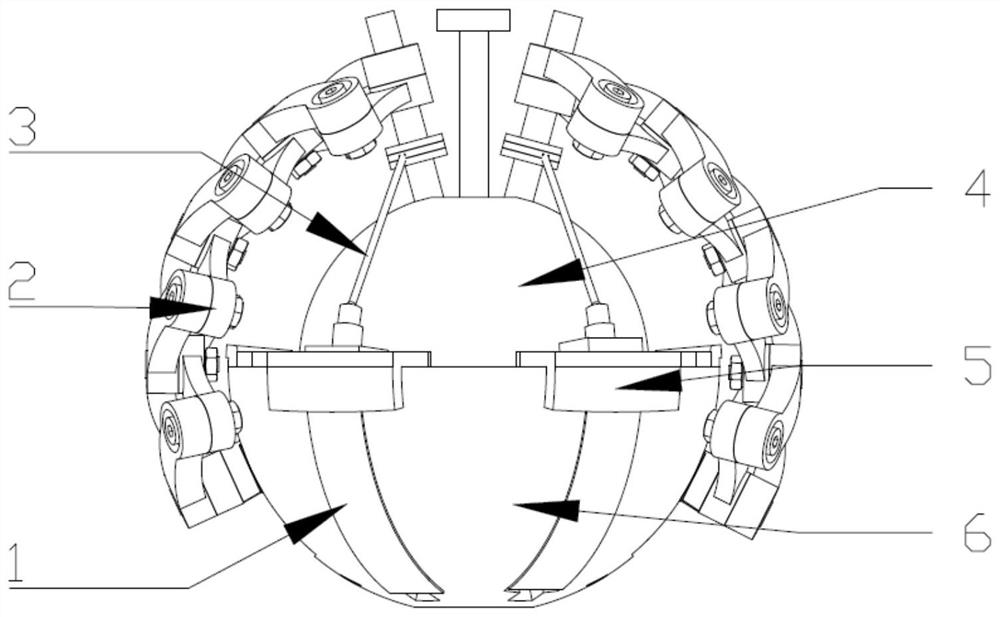
[0018] exist figure 1 Among them, a deployable mechanism 1, two spherical scissor mechanisms 2, a rope 3, a ball head 4, a chute cover 5 and a ball socket 6 together constitute the entire ball and socket joint. One end of the rope 3 is connected to the offset driving rod on the ball head 3, passes through the expandable mechanism 1, and protrudes from the bottom of the driving chute 62, and the other end of the rope 3 is connected to the driver, and the ball head 4 is driven in the ball socket 6 by controlling four ropes. inner movement.
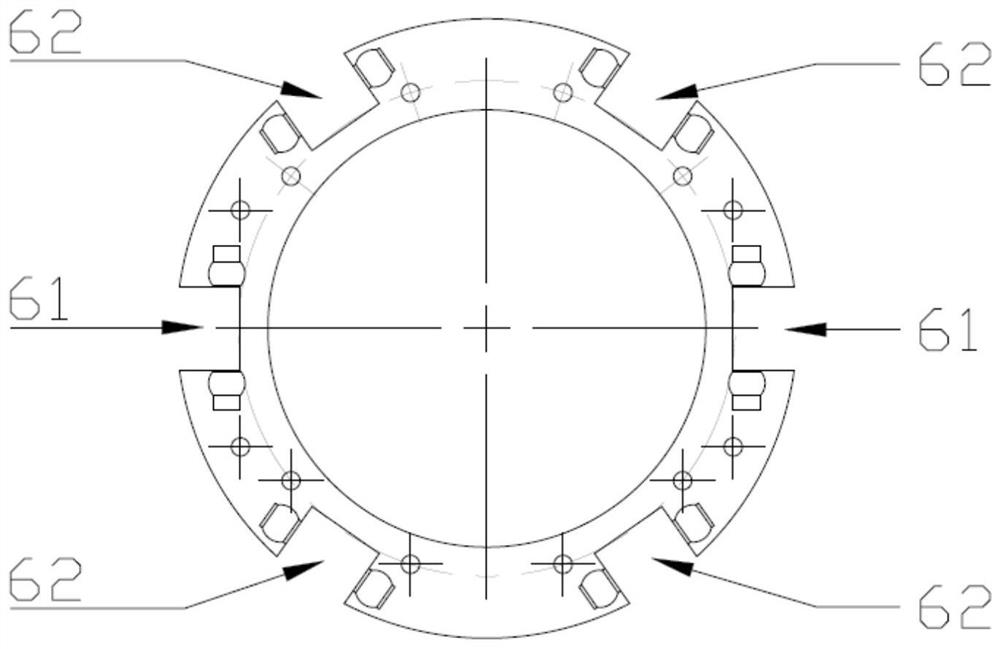
[0019] figure 2 It is a schematic diagram of the ball socket. There are 6 slide rails on the ball socket, 2 flexible slide grooves 61 connected to the spherical scissor mechanism, and 4 drive slide grooves 62 connected to the expandable mechanism.
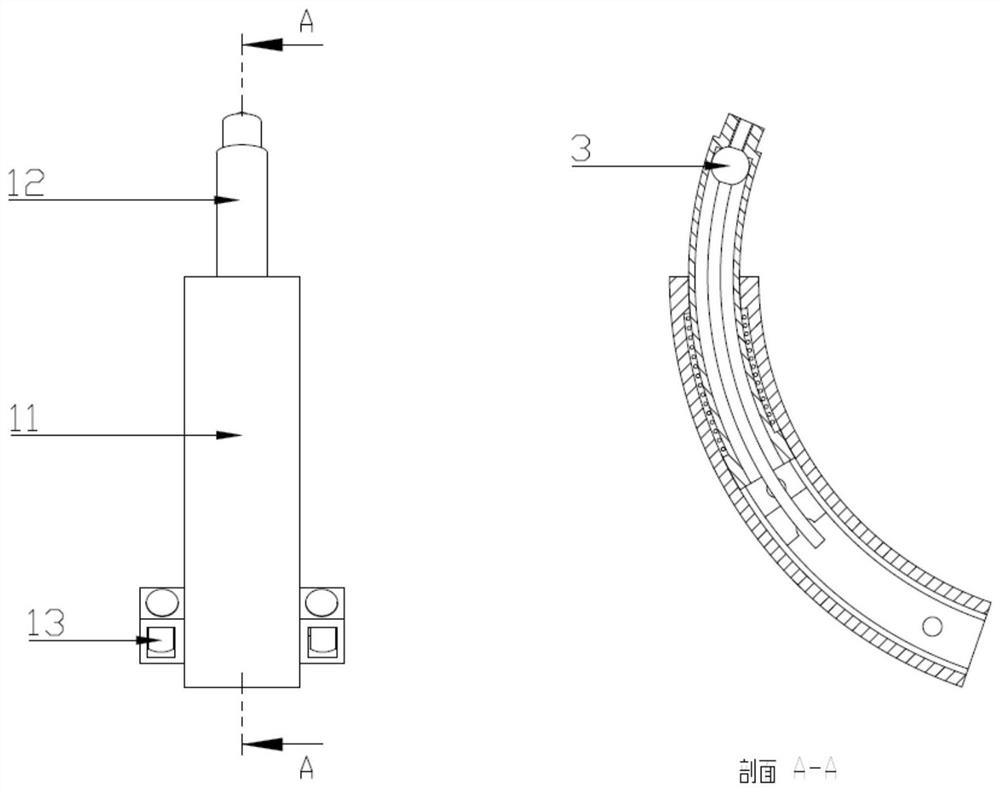
[0020] image 3 It is a schematic diagram of the deployable mechanism, two pulleys 13 are installed on both sides of the first-stage unfolding slider 11 through cylindrical pins, and the seco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More