

Vehicle parking path planning method and device
A path planning, parking position technology, applied in the direction of vehicle position/route/height control, two-dimensional position/channel control, non-electric variable control, etc. high complexity issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
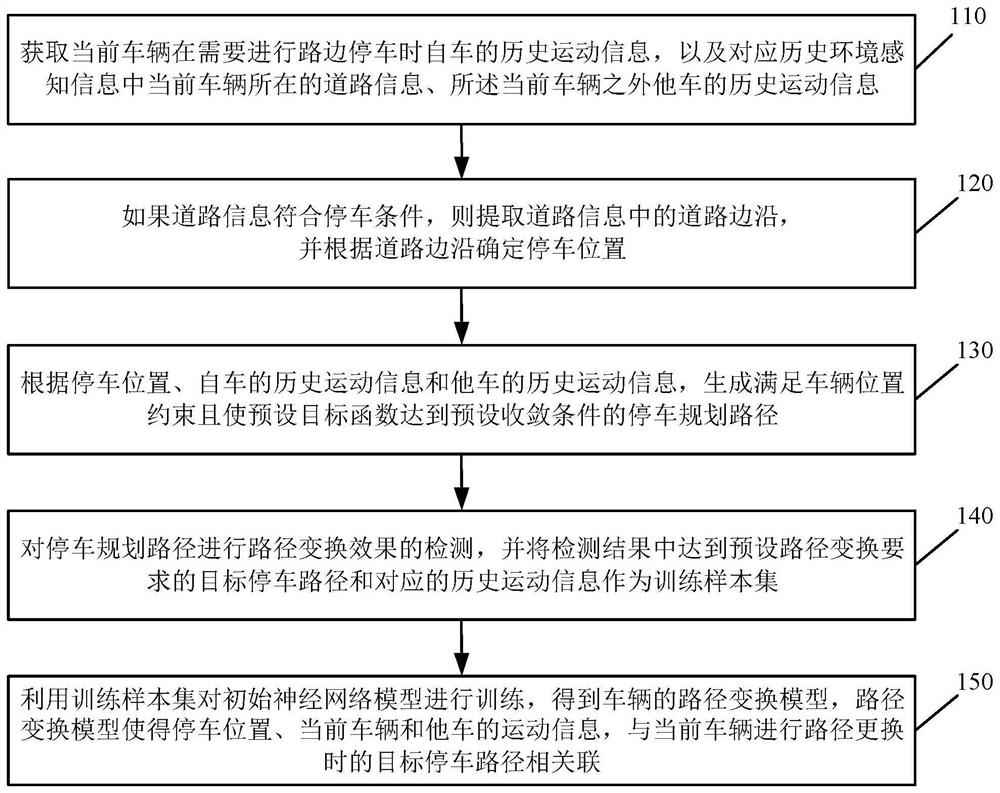
[0091] see figure 1 , figure 1 It is a schematic flowchart of a training method for a vehicle path transformation model provided by an embodiment of the present invention. This method can be applied to the scene where the self-driving vehicle is temporarily parked near the edge of the road. The method can be performed by a training device for a vehicle path transformation model, which can be implemented by means of software and / or hardware, and generally can be integrated in a vehicle-mounted terminal such as a vehicle-mounted computer or a vehicle-mounted industrial personal computer (IPC). The embodiments of the invention are not limited. Such as figure 1 As shown, the method provided in this embodiment specifically includes:
[0092] 110. Obtain the historical motion information of the current vehicle when the current vehicle needs to park on the roadside, and the road information of the current vehicle in the corresponding historical environmental perception informatio...
Embodiment 2
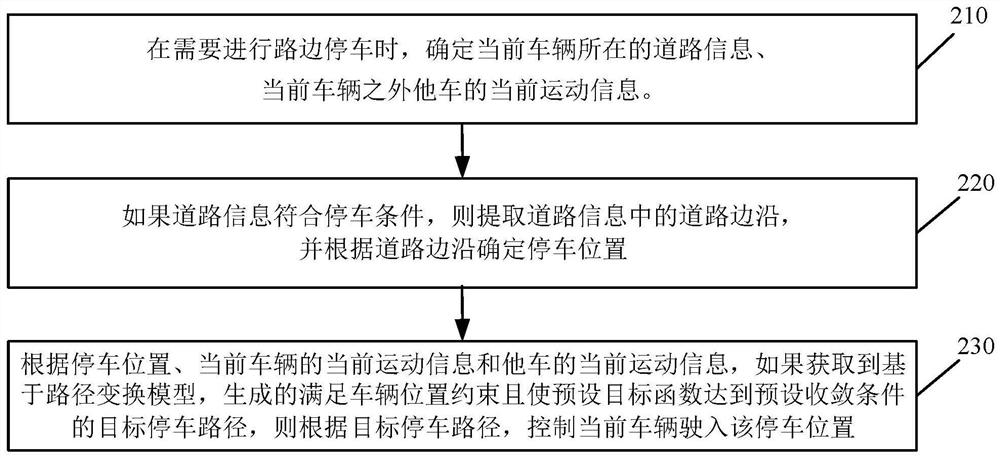
[0114] see figure 2 , figure 2 It is a schematic flowchart of a vehicle parking route planning method provided by an embodiment of the present invention. This method is applied to automatic driving, and is typically applied to the scene of temporary parking near the edge of the road. The method can be executed by a vehicle parking path planning method device, which can be realized by means of software and / or hardware, and can generally be integrated in vehicle-mounted terminals such as a vehicle-mounted computer and a vehicle-mounted industrial personal computer (IPC). The embodiments of the invention are not limited. Such as figure 2 As shown, the vehicle parking path planning method provided in this embodiment specifically includes:
[0115] 210. When on-street parking is required, determine the road information where the current vehicle is located, and the current movement information of other vehicles other than the current vehicle.
[0116] Among them, on-street p...
Embodiment 3
[0149] see Figure 4 , Figure 4 It is a schematic structural diagram of a vehicle parking path planning device provided by an embodiment of the present invention. Such as Figure 4 As shown, the device includes: a current movement information determination module 410, a parking position determination module 420 and a parking module 430, wherein,
[0150] The current motion information determining module 410 is configured to determine the road information where the current vehicle is located and the current motion information of other vehicles other than the current vehicle when on-street parking is required, the current motion information including speed, position and acceleration;
[0151] The parking position determination module 420 is configured to extract the road edge in the road information if the road information meets the parking condition, and determine the parking position according to the road edge;
[0152] The parking module 430 is configured to, according to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More