

Epidemic prevention robot knowledge learning and transfer method and system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0074] Such as figure 1 As shown, this implementation discloses a method for knowledge learning and transfer of epidemic prevention robots, including the following steps S1-S6:
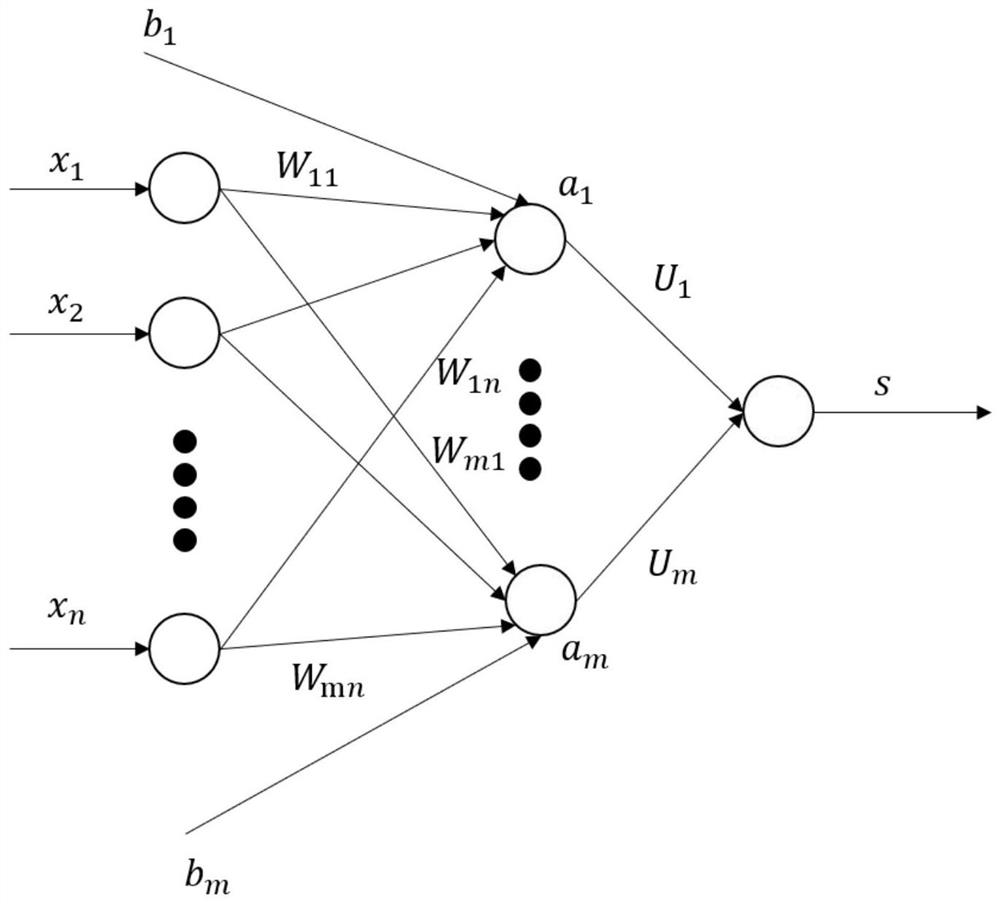
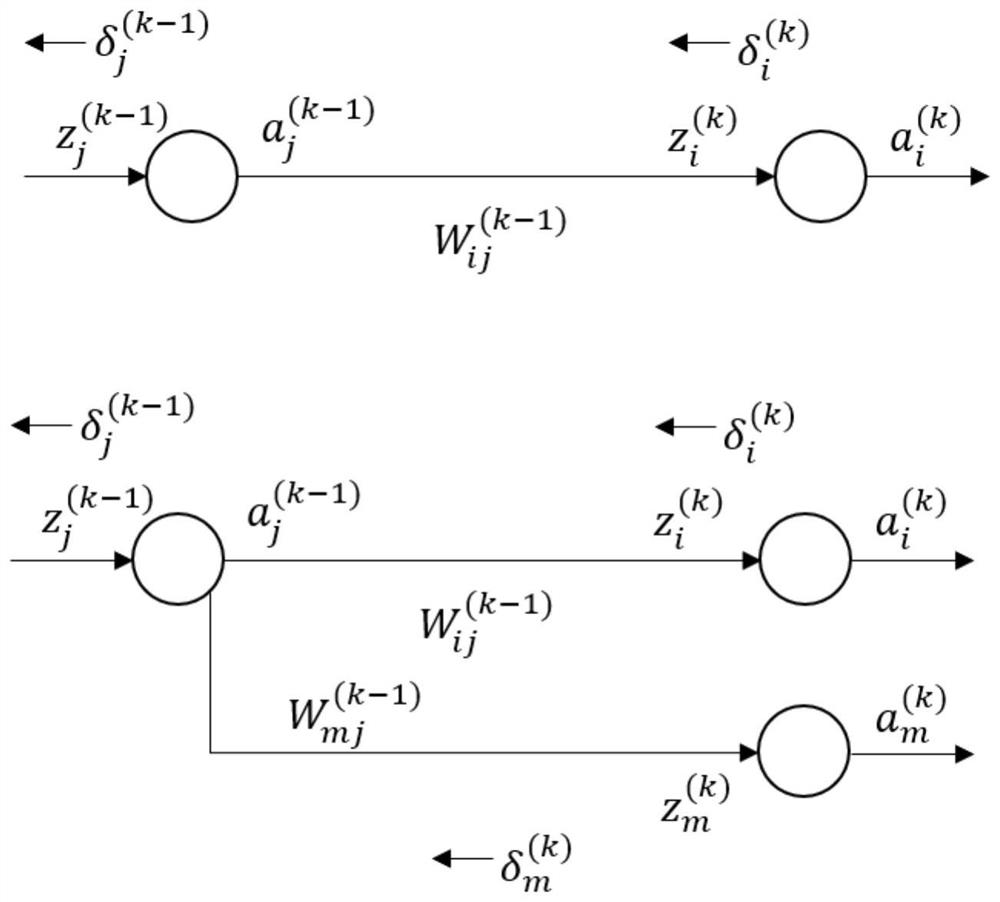
[0075] S1. On the basis of constructing the knowledge base of the epidemic prevention robot, according to the overall task planning and independent task units after sub-task decomposition, conduct research on the construction of multi-task sub-networks; use joint actions, indoor environment, and robot movement of independent sub-tasks The data set of the path trains the sub-network model of each sub-task; defines a sub-neural network containing multiple learnable parameters, iterates the input sub-task data set, and processes the input environment and motion through a multi-layer sub-network structure The data is passed forward, and the difference between the output value and the target value is calculated at the same time, the gradient is propagated back to the parameters of the sub-neural network, a...
Embodiment 2
[0091] The anti-epidemic robot knowledge learning and transfer method provided according to the present invention includes:
[0092] 1. Construction of knowledge base and knowledge transfer process design for epidemic prevention robots
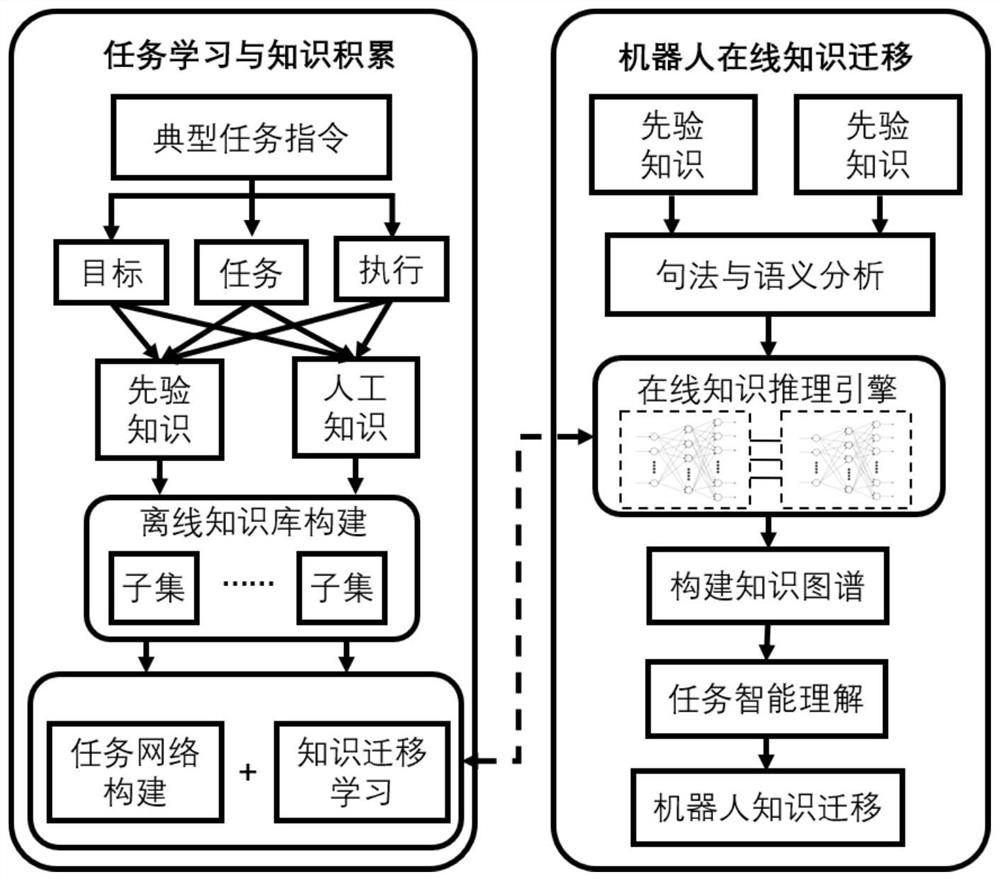
[0093] Such as figure 1 As shown, the task learning and knowledge accumulation and online knowledge transfer of epidemic prevention robots include task decomposition, offline knowledge base construction, task network construction and knowledge transfer learning, online knowledge reasoning engine construction, knowledge graph construction, task intelligence understanding and robot knowledge migrate. The functions of each part are as follows:
[0094] (1) Decompose tasks
[0095] Describe the data model and expression method of robot job task description, decompose the task of the robot, establish the model of the robot's change to the task state, and describe the target state and new target state of each task on the basis of the model. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More