

Impedance control method of multi-joint manipulator based on limited output state in finite time
A multi-joint manipulator, time-limited technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems beyond the scope of the license, unable to guarantee the safe operation of the system, to achieve safety assurance, good force/position tracking control, The effect of strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0114] Basic thought of the present invention is:
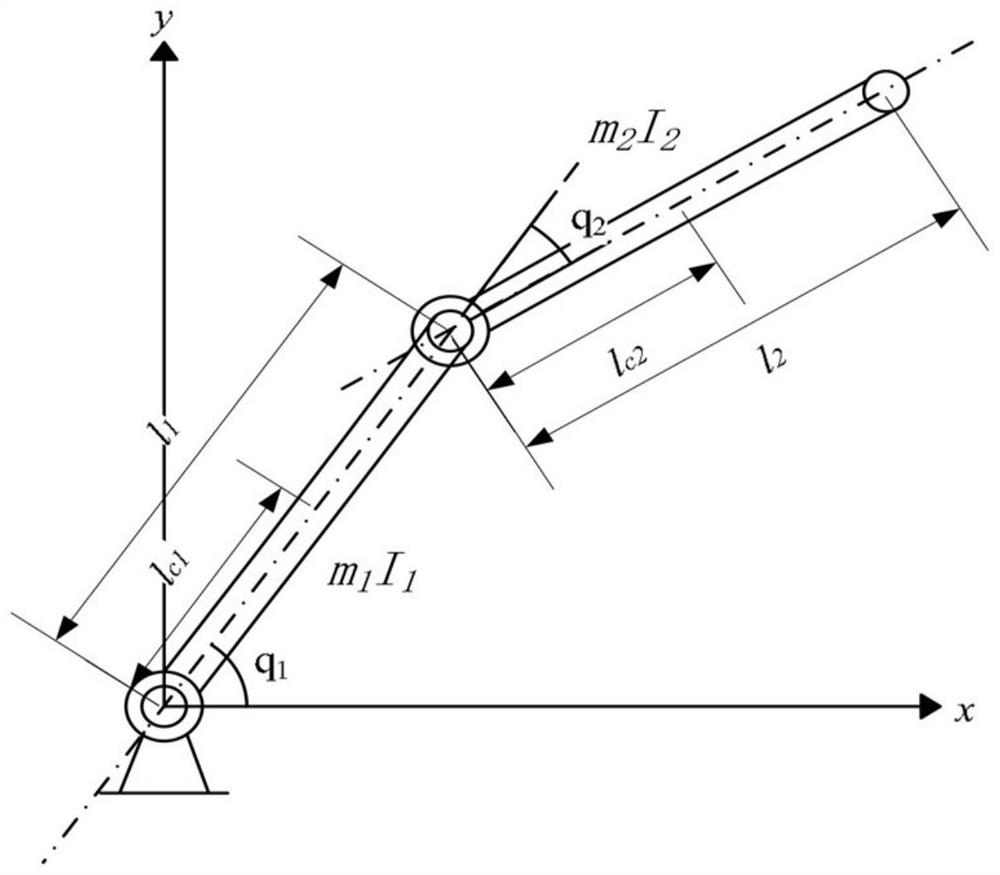
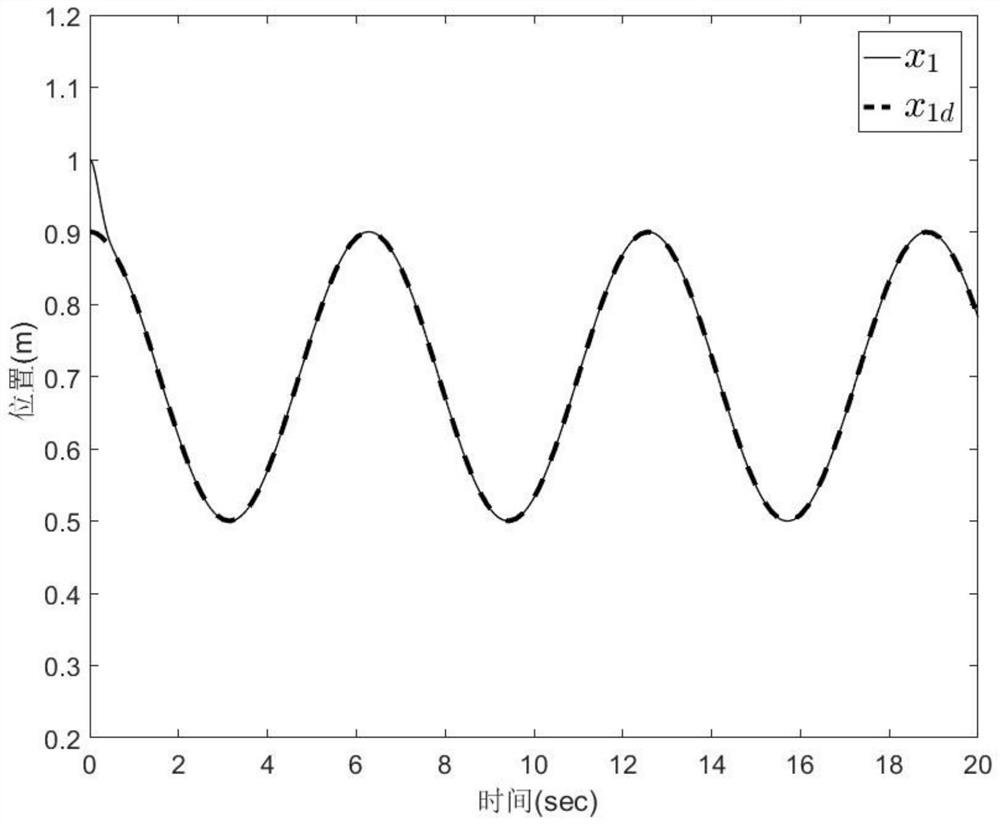
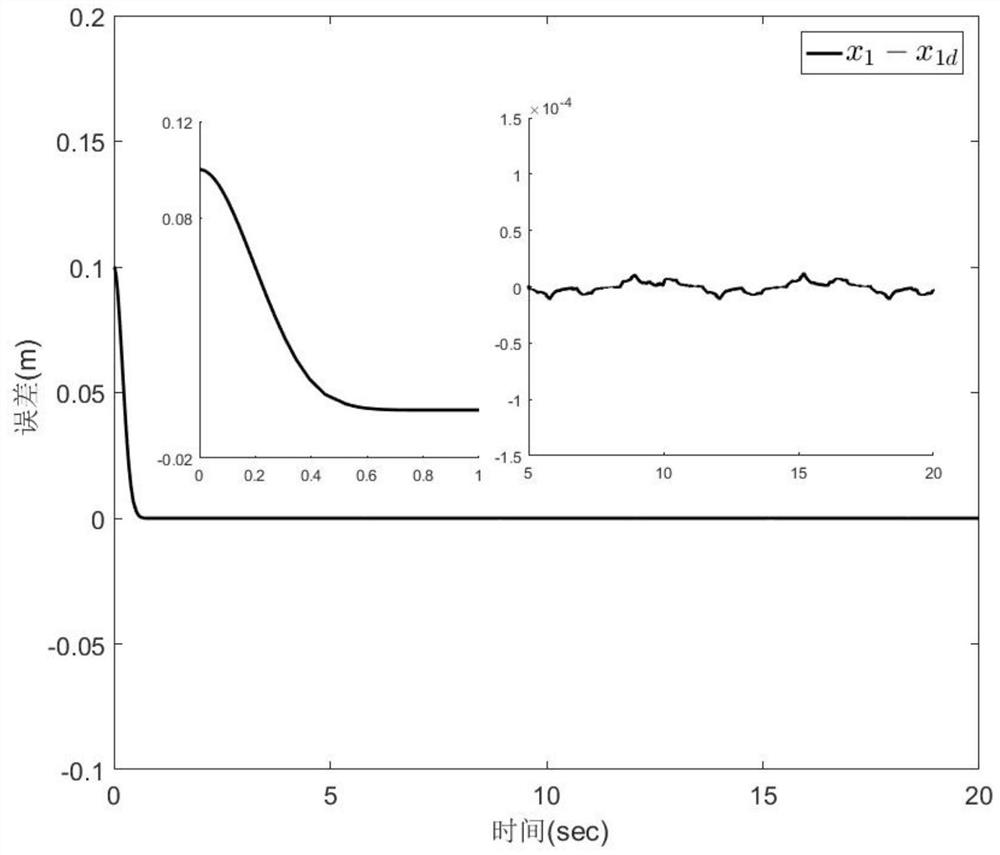
[0115] Based on the impedance control technology, use the backstepping method to construct the intermediate virtual control signal, and obtain the control law step by step, so as to control the end effector of the multi-joint robot arm; use the fuzzy self-adaptive technology to approach the unknown friction in the multi-joint manipulator system To improve the anti-interference performance and robustness of the system, the obstacle Lyapunov equation is introduced to constrain the output control signal of the manipulator, so that the output force / position state is within a limited range to ensure the safe operation of the system. The finite time control makes the force / position tracking signal of the manipulator converge within a finite time, and ensures that the force / position tracking error of the manipulator can converge to a sufficiently small area of the origin within a finite time. The above inventive concept ensures th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More