

A power assessment method based on historical power consumption data for inspection robots
A technology for inspecting robots and power consumption, which is applied in measuring electrical variables, instruments, measuring electricity, etc., can solve different problems, and achieve detailed records and accurate calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will be described in detail in conjunction with the accompanying drawings and specific embodiments. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Example.
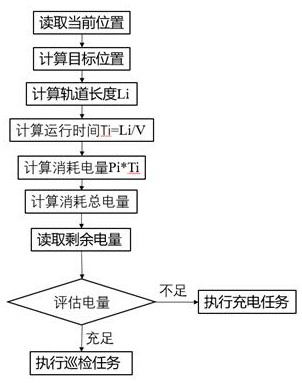
[0029] Such as figure 1 As shown, the present invention provides a power estimation method based on historical power consumption data for inspection robots, based on the historical power consumption data of inspection robots, dynamically evaluates the power required for inspection tasks of inspection robots, wherein, historical The power consumption data is recorded separately according to the type of track, direction of movement and speed of movement, and is updated regularly. The steps are as follows:
[0030] (1) Calibration track data: According to the different track types, the inspection track of the inspecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More