

Unmanned aerial vehicle aerial image target detection method and system based on deep learning
A target detection and deep learning technology, applied in the fields of computer vision and image processing, can solve problems such as low efficiency and achieve the effect of improving detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
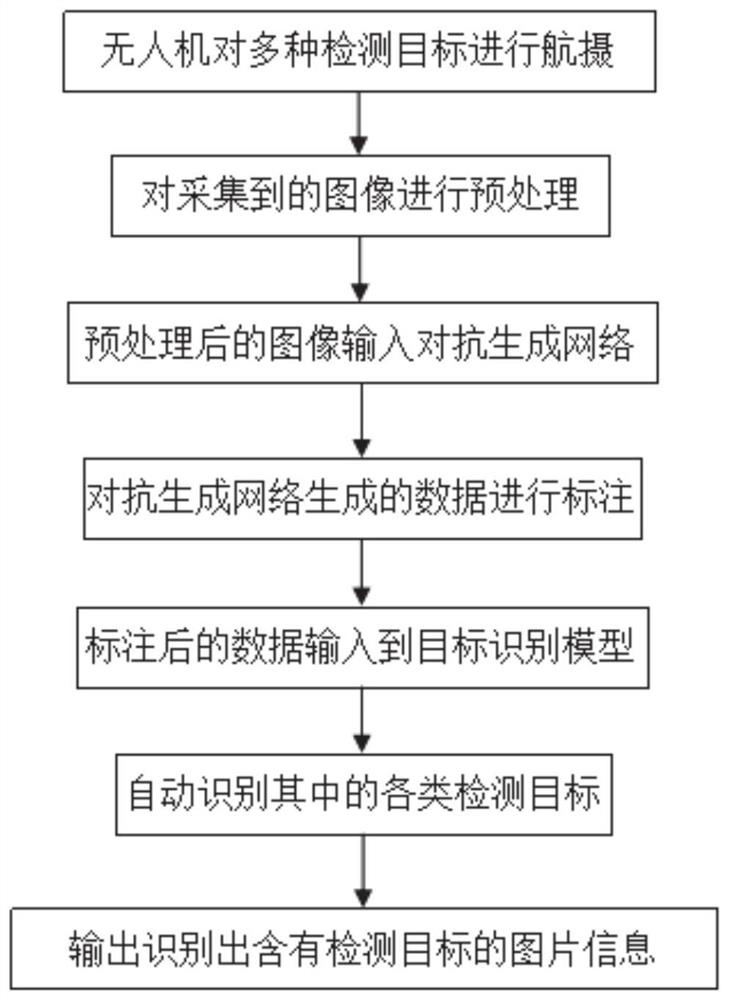
[0040]Such asfigure 1 As shown, the present disclosure provides a method for detecting drone aerial image targets based on deep learning, including: acquiring multiple types of target images and drone images;
[0041]Preprocess the target image, and divide the preprocessed target image into a training set and a verification set;
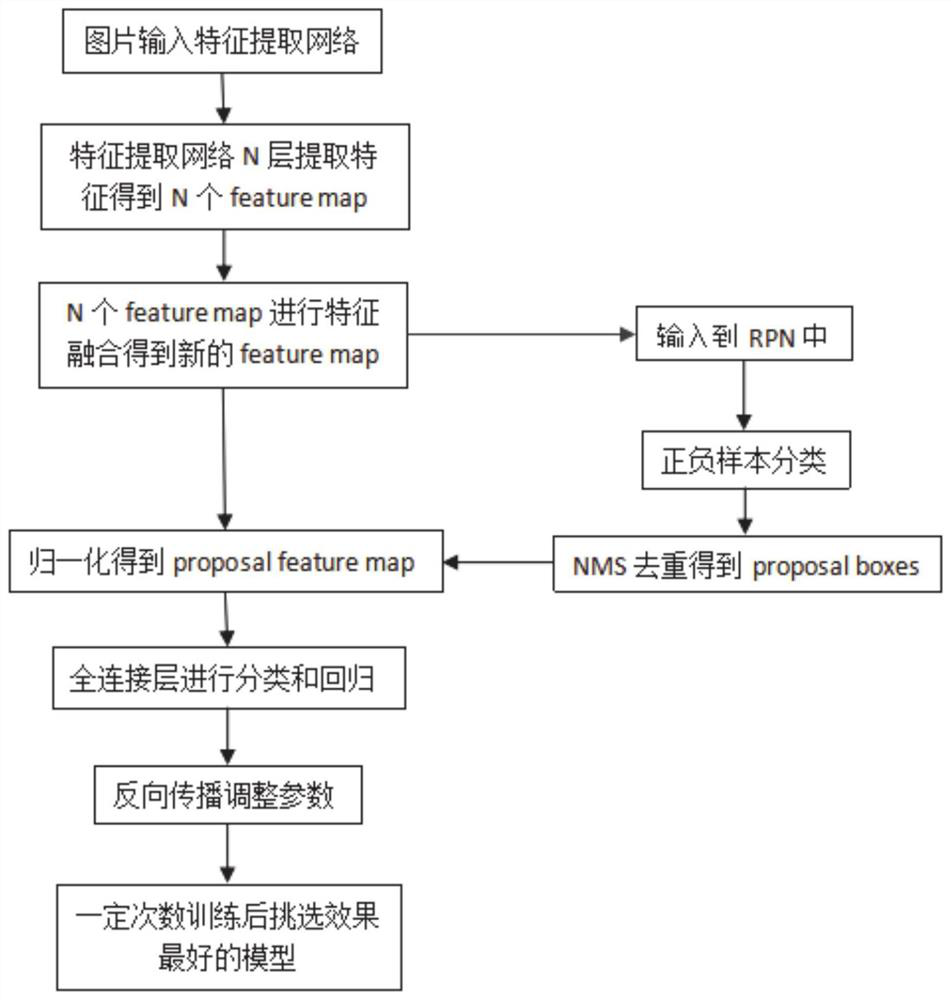
[0042]Establishing a target detection network, the target detection network is used to extract feature maps of the target image, fuse the feature maps to obtain a fusion feature map, and perform model training according to the fusion feature map;
[0043]Input the target image of the training set into the target detection network for training to obtain a trained target detection model;
[0044]Input the target image of the verification set into the trained target detection model for verification, and obtain multiple classification detection target recognition models;
[0045]Input the images taken by the drone into multiple types of detection target recognition models to...
Embodiment 2
[0080]A UAV aerial image target detection system based on deep learning, including:
[0081]The data acquisition module is configured to: acquire various types of target images and images taken by drones;
[0082]The preprocessing module is configured to: preprocess the target image, and divide the preprocessed target image into a training set and a verification set;
[0083]The target detection network establishment module is configured to: establish a target detection network, the target detection network is used to extract a feature map of the target image, fuse the feature maps to obtain a fused feature map, and perform model training according to the fused feature map;
[0084]The training module is configured to: input the target image of the training set into the target detection network for training to obtain a trained target detection model; input the target image of the validation set into the trained target detection model for verification, and obtain more Recognition model for each ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More