

High-rise fire-fighting multi-unmanned aerial vehicle cooperative path planning method in urban block environment
An urban block and multi-UAV technology, which is applied in the direction of finding targets and other directions, can solve problems such as unreasonable paths and inability to cope with the complex and changeable flight environment of urban blocks, and achieve reasonable path planning, high safety, and response speed. quick effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
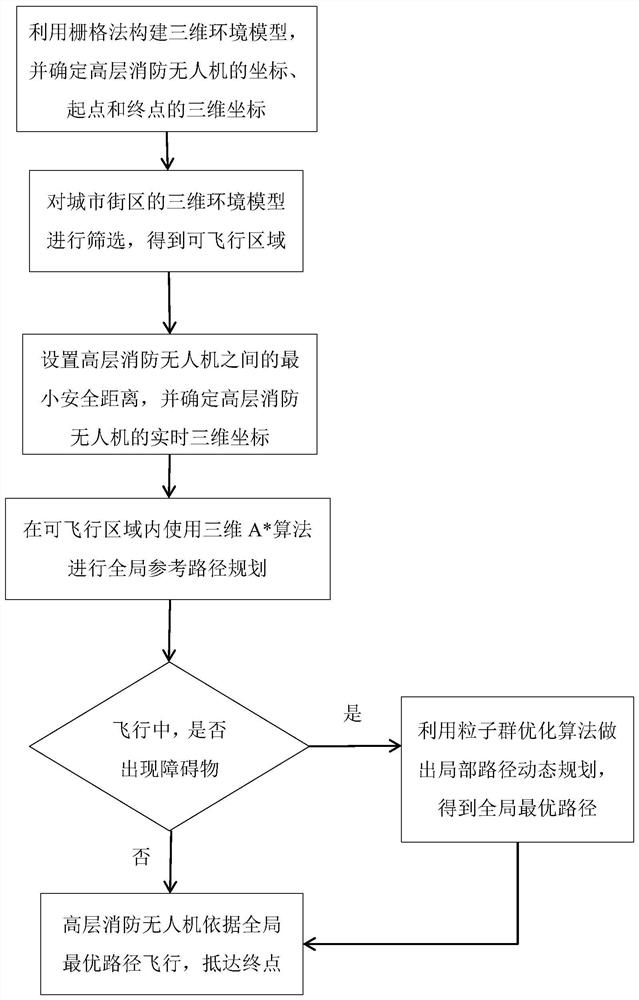
[0049]This embodiment provides a method for collaborative path planning of high-rise firefighting multiple drones in an urban block environment, such asfigure 1 As shown, the method includes the following steps:
[0050]S1: Use the grid method to construct a three-dimensional environment model of the city block. In the three-dimensional environment model, set the coordinates of the high-level fire-fighting drone as D(x,y,z), and the attitude information as D(θ,ψ), where θ is the pitch angle of the high-level fire-fighting drone, and ψ is the heading angle of the high-level fire-fighting drone; in the three-dimensional environment model, determine the three-dimensional coordinates of the starting point and the end point of the high-level fire drone;
[0051]S2: Screen the three-dimensional environment model to obtain a flightable area including the start and end points of the high-rise fire drone;
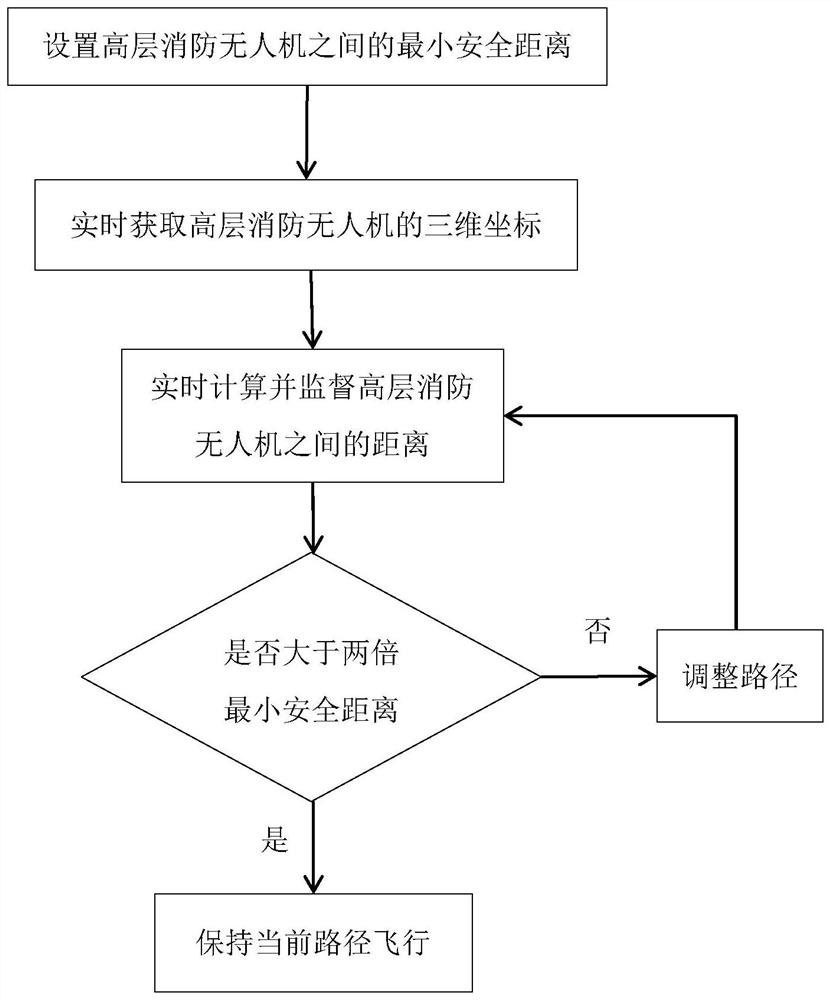
[0052]S3: Set the minimum safety distance between high-rise fire drones, denoted as dsafe , So...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More