A multi-objective trajectory planning method and system for unmanned ships based on inverse reinforcement learning
A technology of reinforcement learning and trajectory planning, applied in control/regulation systems, two-dimensional position/channel control, non-electric variable control, etc., can solve problems such as single target point, difficulty in driving unmanned ships, and inability to respond to emergencies. , to achieve the effect of avoiding algorithm re-operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to make the purpose, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
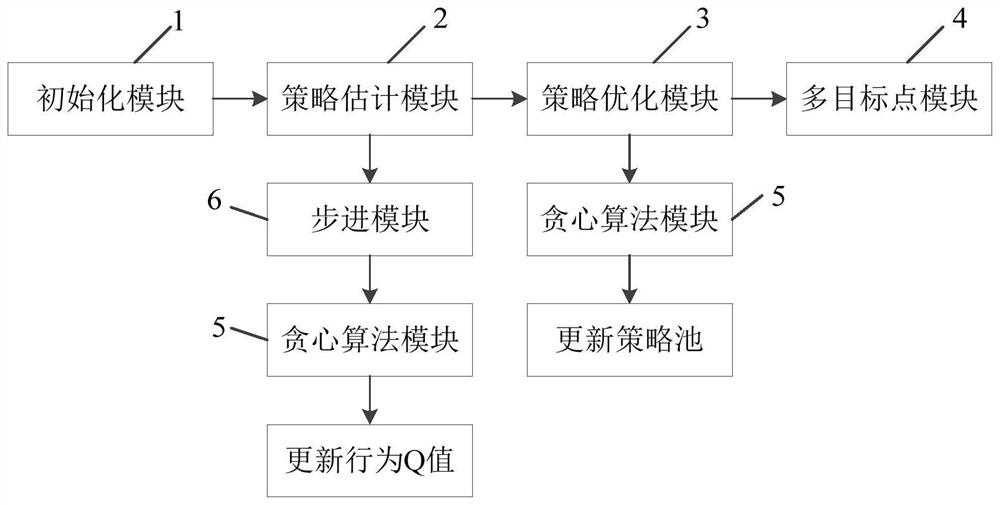
[0047] Please refer to figure 1 , the embodiment of the present invention provides an unmanned ship multi-target trajectory planning system based on inverse reinforcement learning, including an initialization module 1, a strategy estimation module 2, a strategy optimization module 3, and a multi-target point module 4, wherein:
[0048] The initialization module 1 is used to initialize the forward and reverse reinforcement learning models, and initializes the state Q value, behavior Q value function, behavior space, and strategy; the strategy estimation module 2 is used to update the behavior Q value function of the current state; strategy optimization Module 3 uses the update results of strategy estimation module 2 to generate an optimal strategy pool; m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More