Robot driving control method, device and system based on panoramic camera
A panoramic camera and driving control technology, applied in control/regulation systems, two-dimensional position/channel control, non-electric variable control, etc., can solve the problem of robots not being able to drive normally, being easily affected by the environment, applicability of robots, and obstacle avoidance methods Rely on its own detection equipment and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment 1
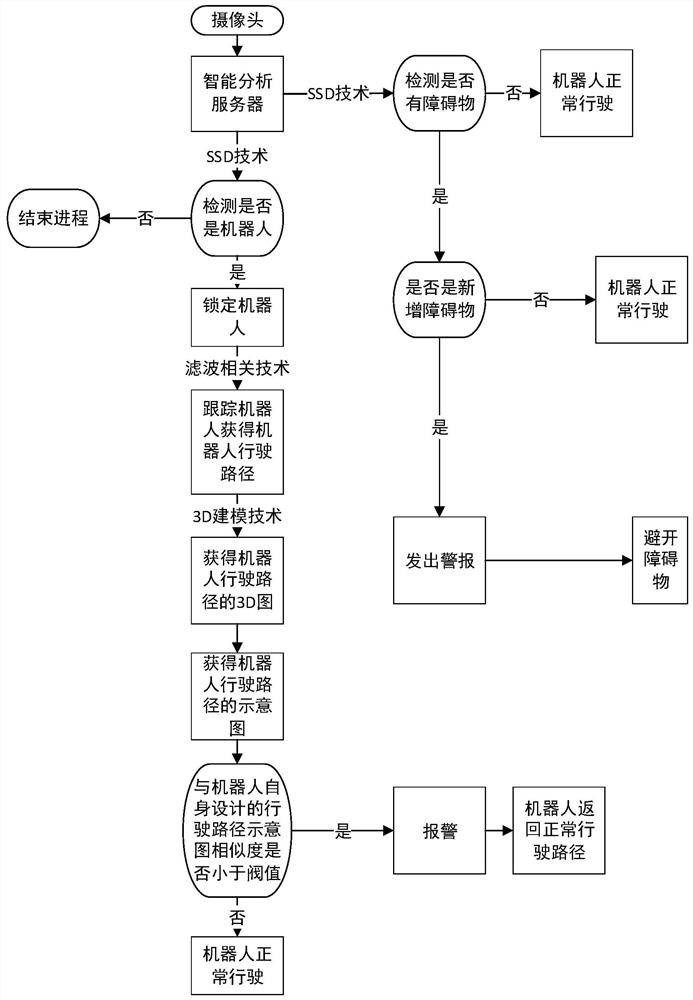
[0069]Such asFigure 1A As shown, the embodiment of the present invention provides a robot driving control method based on a panoramic camera, including:
[0070]In the acquisition step, video data is collected through a panoramic camera;
[0071]Robot detection step, to detect whether there is a robot in the video data;
[0072]In the path acquisition step, if there is a robot, lock and track the robot to obtain the driving path diagram of the robot;
[0073]In the 3D path acquisition step, a 3D map of the robot's travel path is acquired according to the robot's travel path map;
[0074]Schematic diagram obtaining step, according to the 3D diagram of the robot traveling path, obtain a schematic diagram of the robot traveling path;
[0075]The schematic diagram comparison step is to compare the schematic diagram of the robot's traveling path with the schematic diagram of the traveling path designed by the robot itself, and determine whether the similarity between the two is less than a predetermined t...
specific Embodiment 2
[0103]Such asfigure 2 As shown, the embodiment of the present invention provides a panoramic camera-based robot driving control device, including:
[0104]The collection module 201 is used to collect video data through a panoramic camera;
[0105]The robot detection module 202 is used to detect whether there is a robot in the video data;
[0106]The path acquisition module 203 is used for locking and tracking the robot if there is a robot, and acquiring the driving path map of the robot;
[0107]The 3D path obtaining module 204 is configured to obtain a 3D diagram of the traveling path of the robot according to the traveling path diagram of the robot;
[0108]The schematic diagram obtaining module 205 is configured to obtain a schematic diagram of the traveling path of the robot according to the 3D diagram of the traveling path of the robot;
[0109]The schematic diagram comparison module 206 is used to compare the schematic diagram of the traveling path of the robot with the schematic diagram of the...
specific Embodiment 3
[0124]Such asimage 3As shown, the embodiment of the present invention provides a panoramic camera-based robot driving control device, including:
[0125]The robot driving control device 301 based on a panoramic camera in the second embodiment;
[0126]The panoramic camera 302 is used to collect video data.
[0127]The embodiment of the present invention does not limit the control device 301. Preferably, it may be a computer or a server, such as an intelligent analysis server.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More