

Robot and method for picking daylily
A day lily and robot technology, applied in the direction of picking machines, harvesters, agricultural machinery and implements, etc., can solve the problems of complex fruit and vegetable picking robot system and structure, lack of versatility of robots, poor fruit collection effect, etc., to improve picking The success rate, ensuring flexibility and reliability, and avoiding the effect of idling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
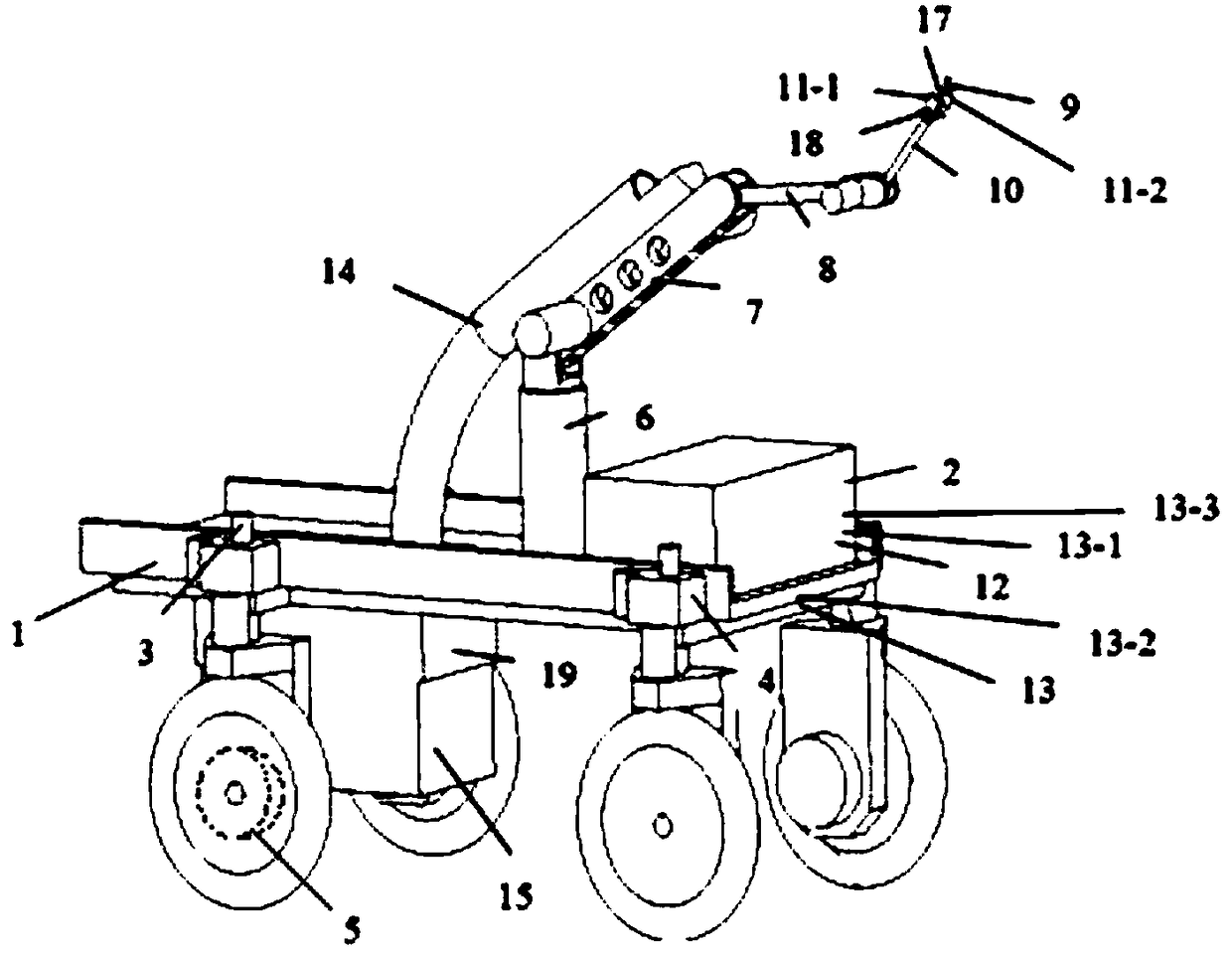
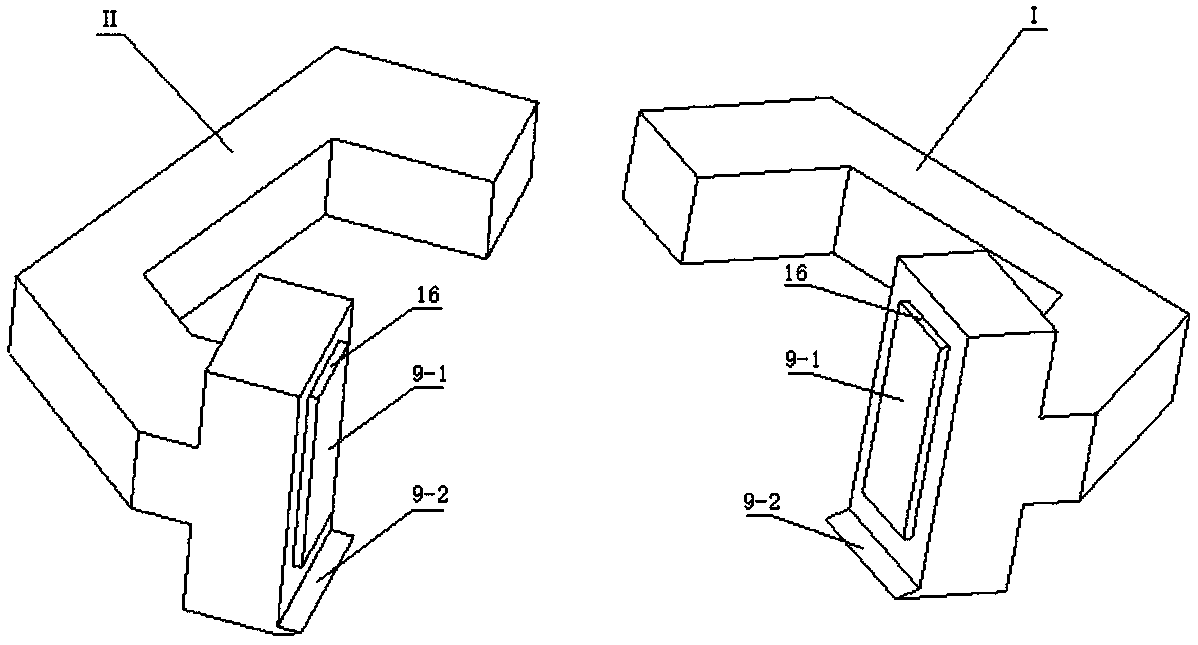
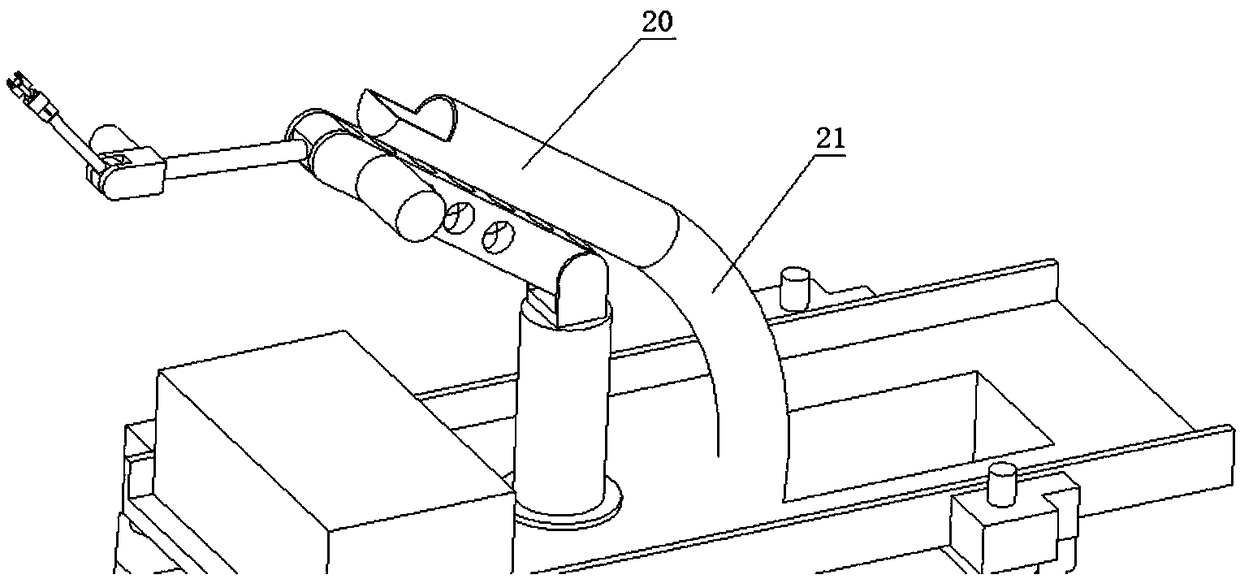
[0049] The robot of picking day lily of the present invention, as figure 1 As shown, it includes a trolley 1; one end of the trolley 1 is provided with a power supply and a power control device 2 , the other end is provided with a laser navigation system 13 , and a mechanical arm is provided on the top of the trolley 1 . The mechanical arm includes a base 6, a shoulder joint 7, an elbow joint 8, and a wrist joint 10 connected in sequence. The base 6 is provided with a motor, the shoulder joint 7 is provided with a motor, the elbow joint 8 is provided with a motor, and the wrist joint 10 is provided with a motor. The upper end of the base 6 is connected to the shoulder joint 7, the upper end of the shoulder joint 7 is connected to the elbow joint 8, the upper end of the elbow joint 8 is connected to the wrist joint 10, and the wrist joint 10 is connected to the binocular camera 11 and the mechanical finger 9 through the adapter device 18, The binocular camera 11 is composed of ...
Embodiment 2
[0057] The method for picking day lily comprises the steps:
[0058] a. Start: the daylily picking robot starts, and the car 1 walks from the collection place to the picking area according to the navigation walking system;
[0059]b. Recognition and positioning: the binocular camera 11 is based on the principle of binocular stereo vision positioning, through image acquisition, comparison with samples in the image database, extraction of target feature points, camera calibration, image processing, stereo matching and three-dimensional reconstruction; Obtain the parallax between the matching points of the image pair, obtain the three-dimensional coordinates of the feature points, and feed them back to the power supply and power control device 2;
[0060] c. Picking: The host computer sends instructions to the controller through the CAN bus to control the movement of the shoulder joint 7, elbow joint 8, wrist joint 10 and adapter device 18 in the robotic arm, and the motor that d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More