

Grabbing path control method of sphere-like fruit picking mechanical arm
A path control and robotic arm technology, which is applied to picking machines, manipulators, program-controlled manipulators, etc., to avoid grasping failures, avoid fruit damage, and improve the success rate.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be described in detail below in conjunction with the accompanying drawings.
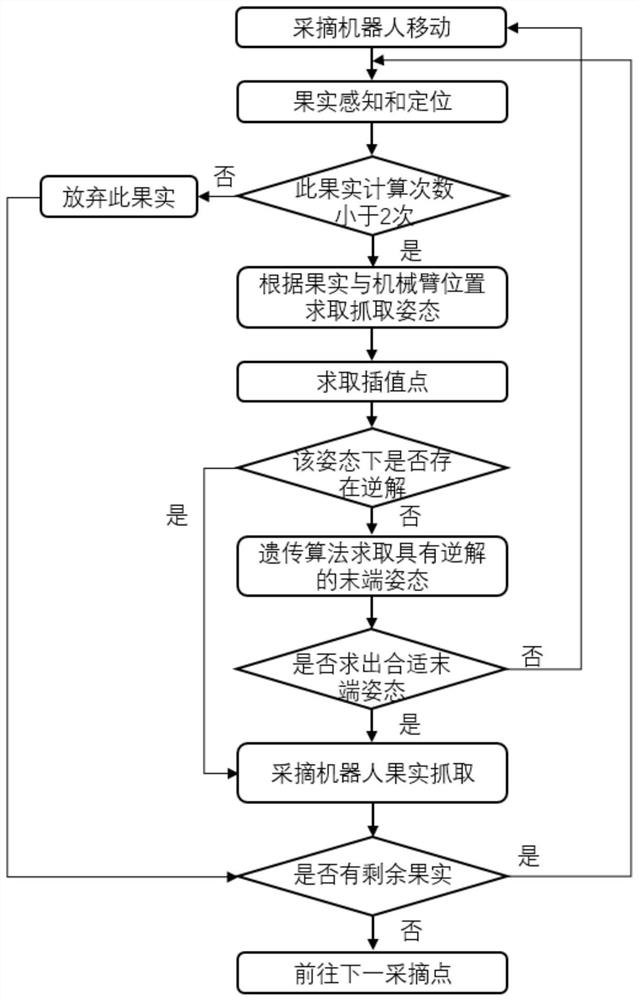
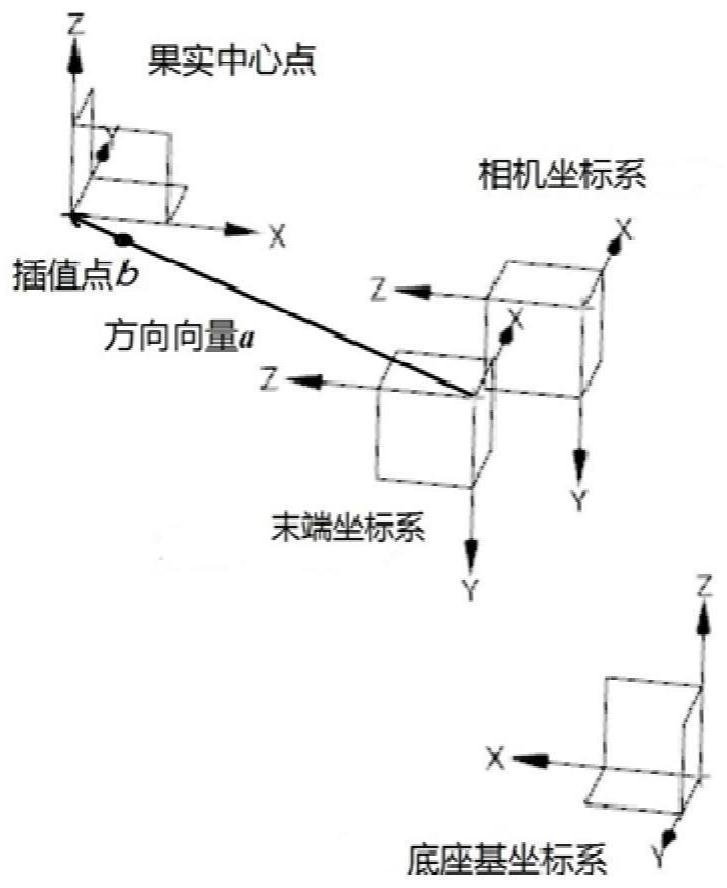
[0043] 1. The flow chart of fruit picking by applying the grasping control method of a spherical fruit picking robot is as follows: figure 1 shown. After the picking robot arrives at the picking location, it senses the environment. The depth camera collects the environmental information and uses the deep learning algorithm to identify and locate the fruit. Number and count the recognized fruits. If the fruit has been grasped and calculated less than 2 times, the fruit position information is converted from the camera coordinate system to the end coordinate system of the robot arm, and according to the fruit center point position and end coordinates The relative position of the origin of the system is used to obtain the attitude of the end of the manipulator, and the vector from the origin of the end coordinate system of the manipulator to the center point of the fru...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More