

Self-propelled variable-gap solanaceous vegetable harvester
A self-propelled, picking machine technology, applied in the direction of picking machines, harvesters, agricultural machinery and implements, etc., can solve the problems of high labor intensity and low degree of automation, and achieve high degree of automation, small damage to plants, and success rate of picking. high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with accompanying drawing:
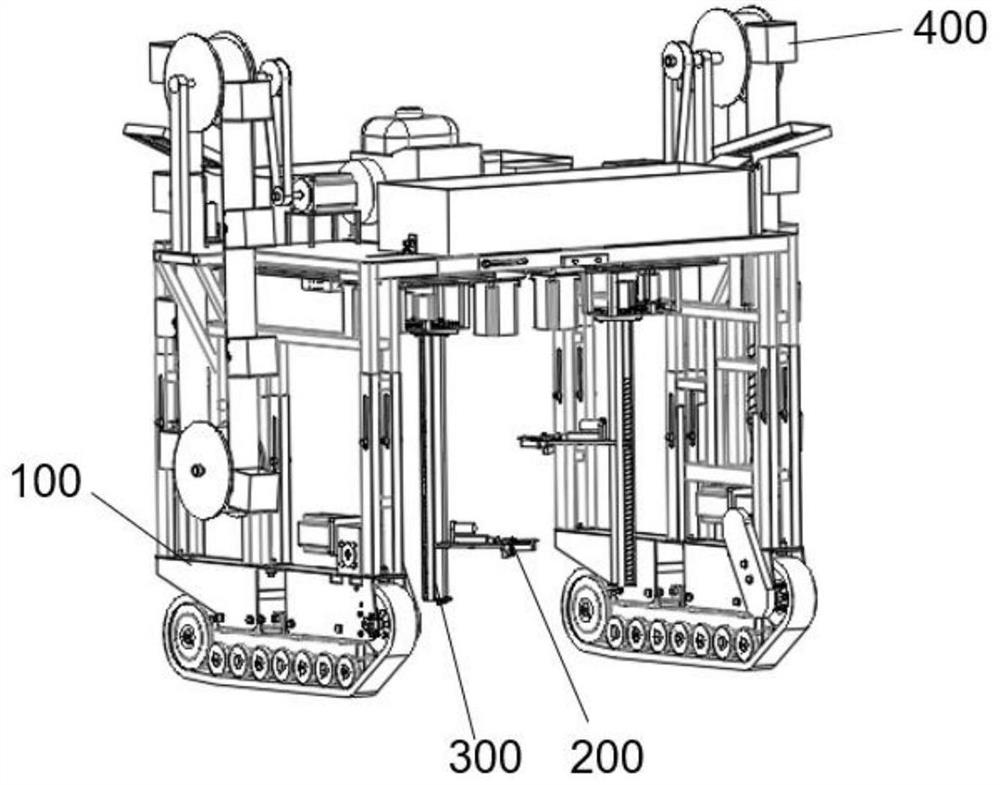
[0028] like figure 1 As shown, the self-propelled variable-gap solanaceous vegetable picking machine consists of a mobile platform 100, a picking manipulator 200, a manipulator moving module 300 and a fruit transport module 400.
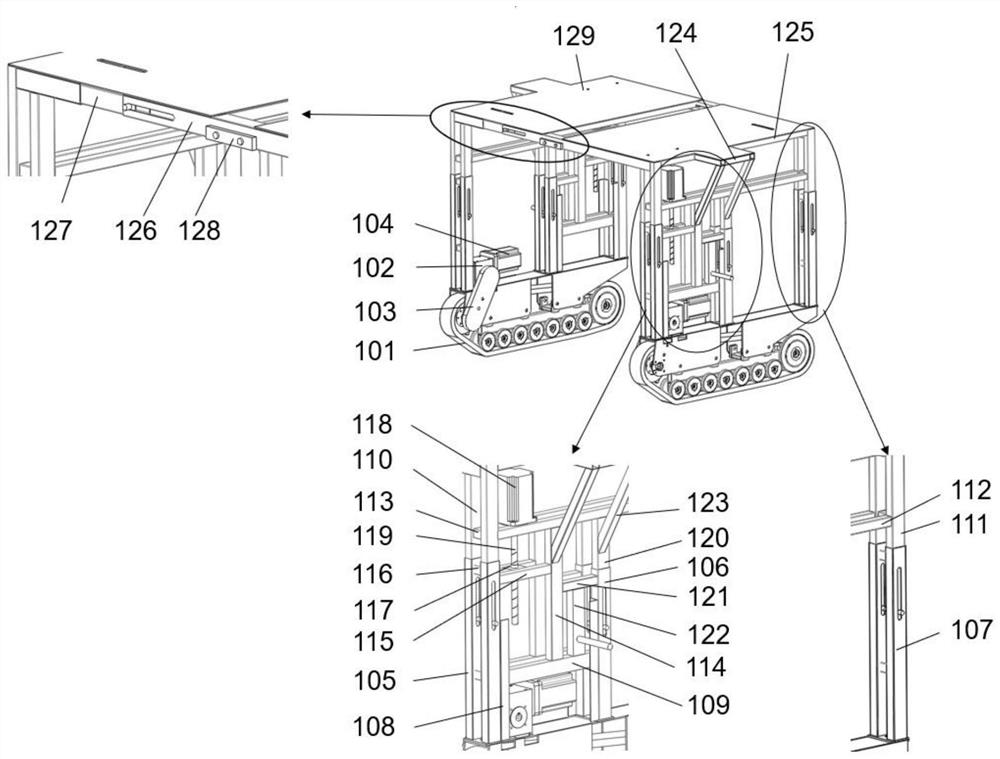
[0029] like figure 2 As shown in the self-propelled variable-gap solanaceous vegetable picking machine, the mobile platform 100 is composed of a track wheel mechanism 101, a track wheel reduction box 102, a track wheel drive chain mechanism 103, a track wheel drive motor 104, and a first support longitudinal bar 105. , the second support longitudinal bar 106, the third support longitudinal bar 107, the bracket slide rail 108, the first connecting bar 109, the fourth supporting bar 110, the fifth supporting bar 111, the second connecting bar 112, the third Connecting cross bar 113, the sixth support longitudinal bar 114, the fourth connecting cr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More