

Efficient agricultural picking device based on DELTA parallel mechanical arm
A mechanical arm and parallel technology, which is applied in the field of high-efficiency agricultural picking devices, can solve the problems that crops cannot be accurately identified and cannot be picked, and achieve the effects of improved picking success rate, high rigidity, and strong carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
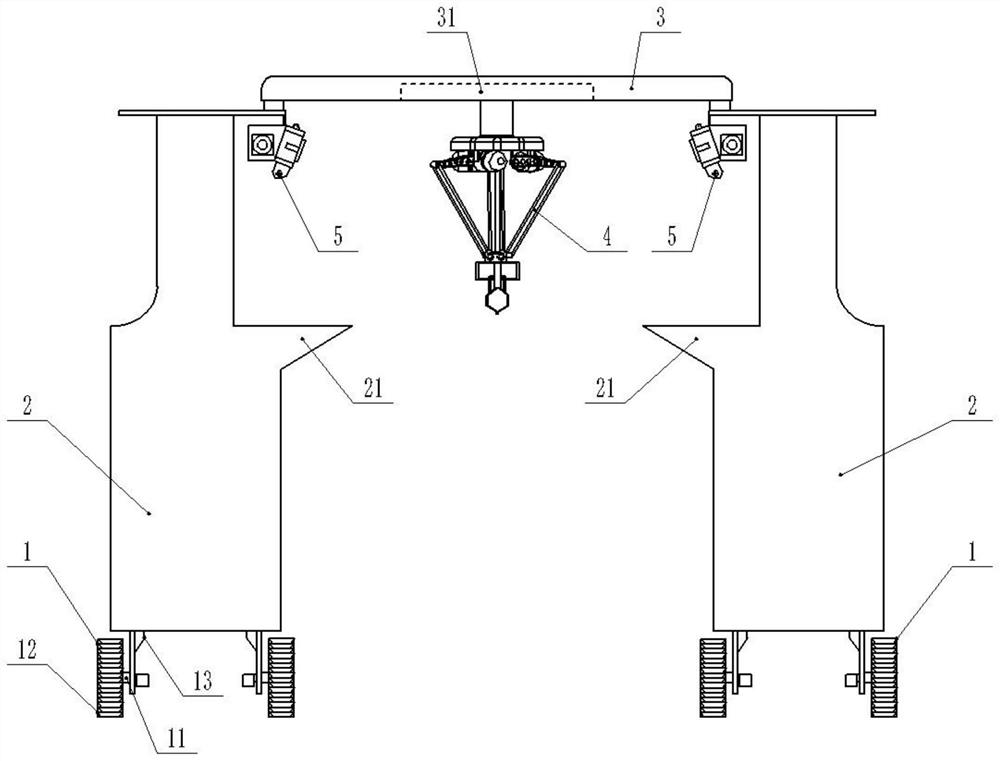
[0041] Example: such as figure 1 As shown, a high-efficiency agricultural picking device based on a DELTA parallel robot arm includes four moving crawlers 1, two fruit and vegetable collection mechanisms 2, a roof integrated structure 3, a picking mechanism 4 and two binocular vision cameras 5. in:
[0042] In order to make the picking device reach the picking destination, every two moving crawlers 1 include a driving wheel 11, a driving crawler 12 and a shock absorbing mechanism 13, and the two driving wheels 11 are respectively arranged at the lower end of the fruit and vegetable collecting mechanism 2; the driving crawler 12 is sleeved on Two driving wheels 11 outside; the shock absorbing mechanism 13 is arranged on the connection between the driving wheels 11 and the lower end of the fruit and vegetable collecting mechanism 2 .
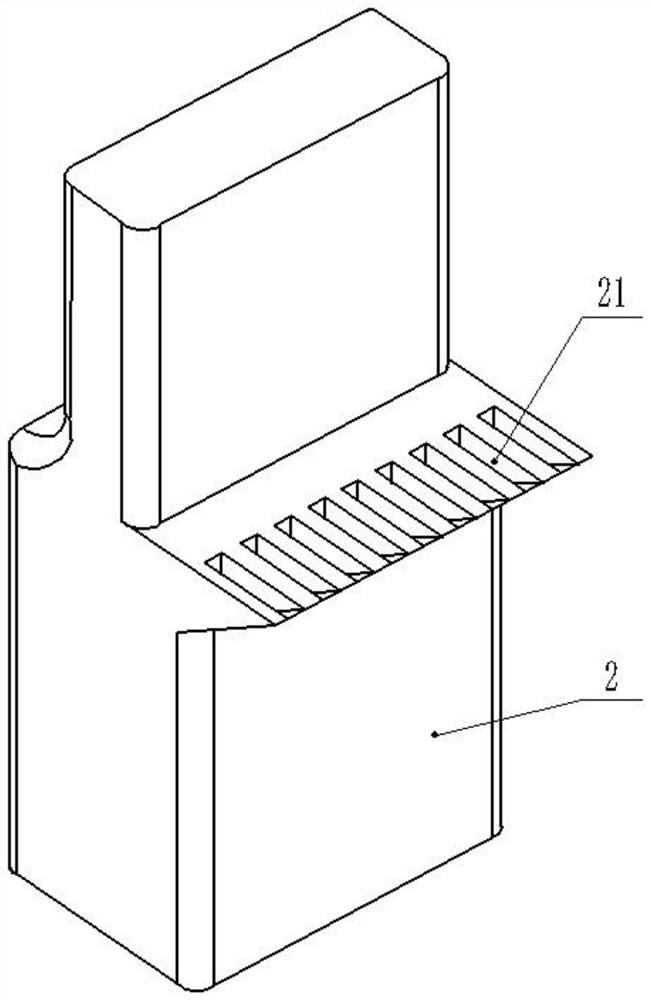
[0043] For the fruits and vegetables picked by the picking device, a non-destructive collection device is needed, so a fruit and vegetable colle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More