Multi-robot cooperative movement and dynamic obstacle avoidance method, device, equipment and medium
A dynamic obstacle avoidance and multi-robot technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/lane control, etc., can solve problems such as robot vibration, not considering the dynamic movement of surrounding objects, and planning paths falling into local optimum
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
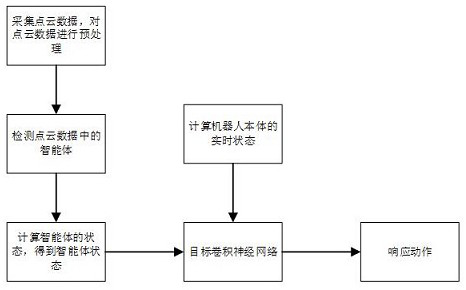
[0056]This embodiment provides a multi-robot cooperative movement and dynamic obstacle avoidance method. First, the environment where the robot body is located is 3D modeled in advance, and the intelligent bodies around the robot body (including other The real-time state of the robot and pedestrian) is sequentially input into the trained target convolutional neural network to output the real-time response action of the robot body, so that the robot body can perform real-time response actions and move safely and without collision until reaching the target point.
[0057] According to the above principles, the method of multi-robot cooperative movement and dynamic obstacle avoidance is introduced, such as figure 1 As shown, the multi-robot cooperative movement and dynamic obstacle avoidance method specifically includes the following steps:
[0058] Obtain the pose of the robot body, and calculate the real-time state of the robot body according to the pre-built 3D point cloud map...
Embodiment 2
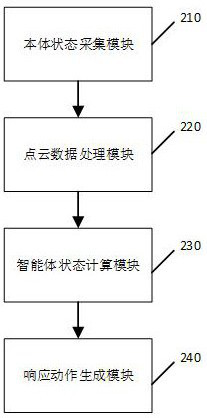
[0137] This embodiment corresponds to the multi-robot cooperative movement and dynamic obstacle avoidance method of embodiment 1, and discloses a multi-robot cooperative movement and dynamic obstacle avoidance device, which is the virtual device structure of the above-mentioned embodiment 1, please refer to figure 2 shown, including:
[0138] The body state acquisition module 210 is used to obtain the robot body pose, and calculate the real-time state of the robot body in real time according to the pre-built three-dimensional point cloud map and the robot body pose;
[0139] The point cloud data processing module 220 is used to collect real-time point cloud data, preprocess the point cloud data, and detect some agents in the preprocessed point cloud data;
[0140] The agent state calculation module 230 is used to calculate the real-time states of the several agents respectively;
[0141] The response action generation module 240 is configured to sequentially input the real-t...
Embodiment 3
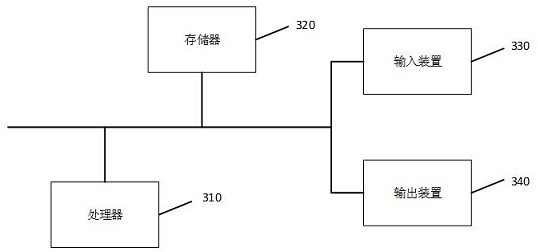
[0143] image 3 A schematic structural diagram of an electronic device provided in Embodiment 3 of the present invention, such as image 3 As shown, the electronic device includes a processor 310, a memory 320, an input device 330, and an output device 340; the number of processors 310 in the electronic device may be one or more, image 3 Take a processor 310 as an example; the processor 310, memory 320, input device 330 and output device 340 in the electronic device can be connected by bus or other methods, image 3 Take connection via bus as an example.
[0144] The memory 320, as a computer-readable storage medium, can be used to store software programs, computer-executable programs and modules, such as the program instructions / modules corresponding to the multi-robot cooperative movement and dynamic obstacle avoidance method in the embodiment of the present invention (for example, multiple Body state acquisition module 210, point cloud data processing module 220, agent s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More