

Obstacle trajectory prediction method and device
A trajectory prediction and obstacle technology, applied in the computer field, can solve the problems of poor trajectory accuracy of obstacles, failure to describe obstacle interaction, etc., and achieve the effect of high trajectory accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
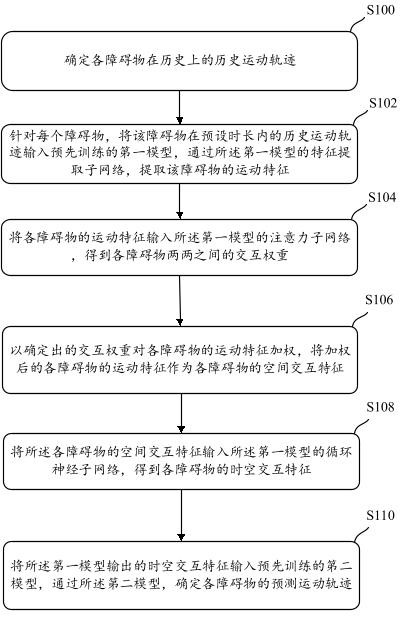
[0084] figure 1 It is a schematic flow chart of an obstacle trajectory prediction method in this manual, which specifically includes the following steps:
[0085] S100: Determine the historical movement track of each obstacle in history.
[0086] The trajectory prediction method provided in this manual can be executed by unmanned equipment (hereinafter referred to as unmanned vehicle), or by electronic equipment that can transmit information with unmanned vehicles or control unmanned vehicles, such as notebooks Computers, mobile phones, servers, etc., this manual does not limit them. For the convenience of description, this specification takes the unmanned vehicle as the execution subject, and exemplifies the trajectory prediction method provided in this specification.
[0087] The unmanned vehicles described in this specification may include self-driving vehicles and vehicles with assisted driving functions. Unmanned vehicles can be delivery vehicles used in the distributi...
Embodiment 2
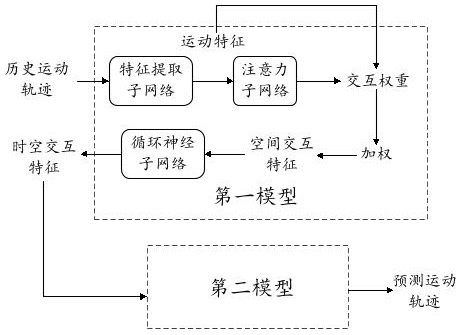
[0123] Figure 7 The training provided for the embodiment of this specification is as follows: figure 2 The schematic flow chart of the first model and the second model shown, including:
[0124] S700: Determine each sample obstacle and a sample trajectory corresponding to each sample obstacle.
[0125] S702: According to the preset reference time, for each sample obstacle, among the sample trajectories corresponding to the sample obstacle, the trajectory before the reference time is taken as the initial trajectory of the sample obstacle, and at the reference time The final trajectory is used as the labeled trajectory of the sample obstacle.
[0126] Generally speaking, the sample trajectory is the historical real trajectory of each obstacle collected in advance. Specifically, sensing equipment can be arranged in the real environment in advance, and the collected obstacles can be selected as sample obstacles, and the collected The real trajectories of the obtained sample o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More