

Control circuit of foot type robot
A technology for controlling circuits and robots, applied in the control of the speed or torque of motors, control systems, motor vehicles, etc., can solve problems such as poor flexibility, complex circuits of foot robots, and prone to line failures, and avoid overall paralysis. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The specific implementation manners of the present invention will be described below in conjunction with the accompanying drawings.
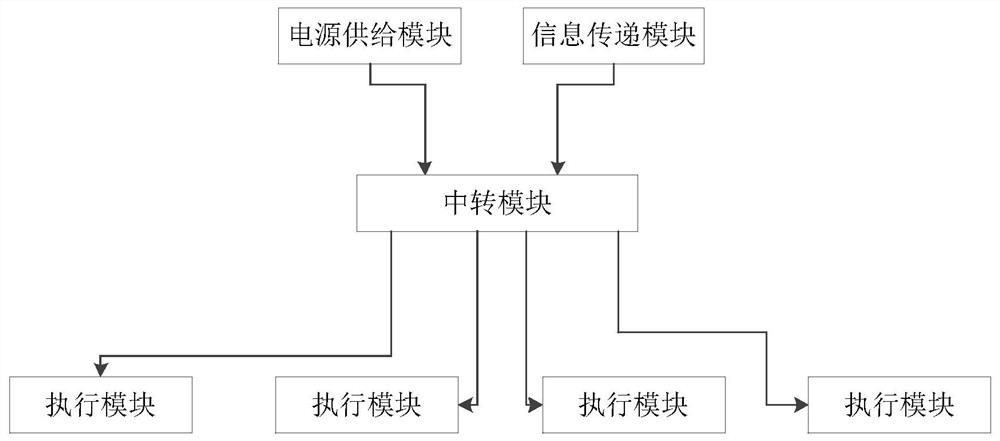
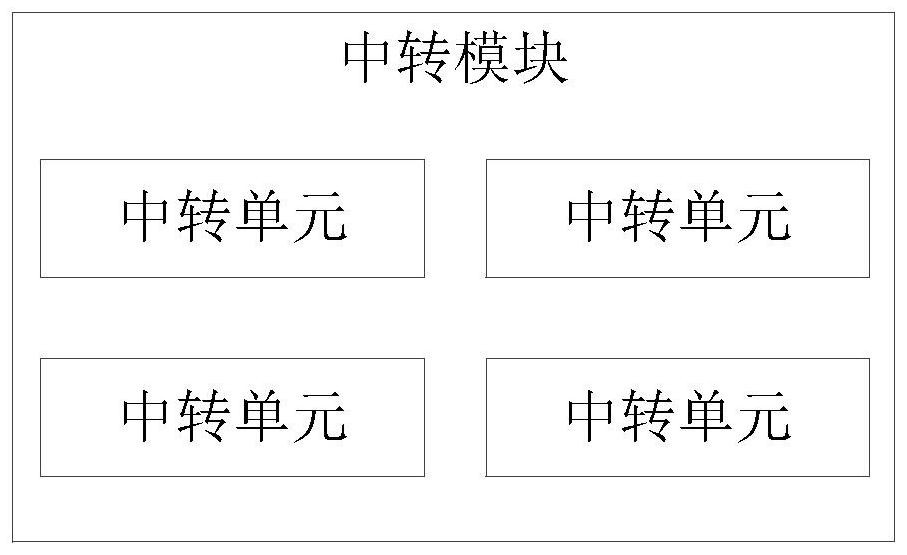
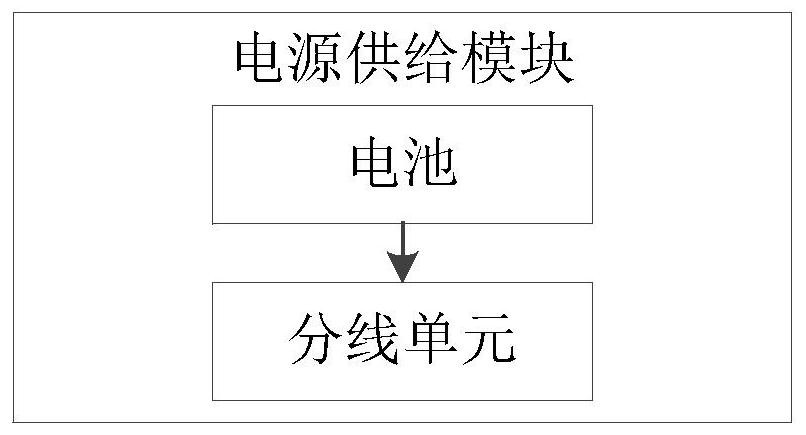
[0018] The invention discloses a control circuit of a legged robot, which is used to control the legs of the legged robot, and includes a power supply module, an information transmission module, a transfer module and a plurality of execution modules. Among them, the power supply module supplies electric energy for the legs of the legged robot, and the information transmission module transmits signals to the legs of the legged robot. Data communication and data communication, the information transmission module transmits control signals for the transfer module to control the legs of the legged robot; multiple execution modules, the execution module and the transfer module are electrically connected and data communication, and the transfer module will obtain from the power supply module The power is transmitted to the execution module and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More