

Mobile robot path planning method and device capable of adaptively adjusting path point tolerance
A mobile robot, self-adaptive adjustment technology, applied in the field of robotics and navigation, can solve the problems of decreased positioning quality and low path planning efficiency, and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
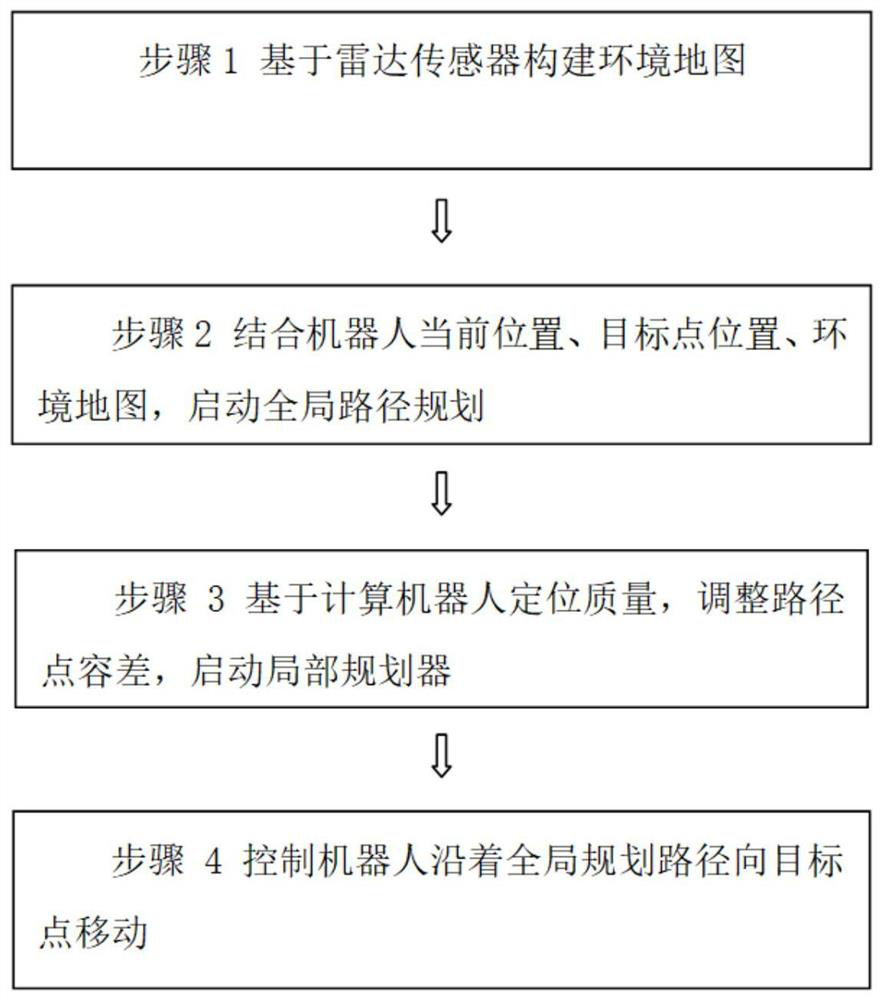
[0034] Such as figure 1 As shown, a mobile robot path planning method for adaptively adjusting the tolerance of waypoints, including:
[0035] Step 1. According to the target point, the current position of the robot and the environment map, perform global path planning to obtain a global planning path, and the global planning path is a set of global planning path points.
[0036] The environment map is constructed based on radar sensors, including but not limited to dTOF radar or lidar. To construct an environmental map based on radar sensors, algorithms such as Gmapping, HectorSLAM, and Cartographer can be used to construct a two-dimensional grid map.
[0037] The global path planning includes, but is not limited to, A*, Dijkstra, artificial drawing, and the like.
[0038] Step 2. Start the local planner according to the set of global planning path points, and control the robot to move to the target point along the global planning path.
[0039] The local planner includes ...
Embodiment 2
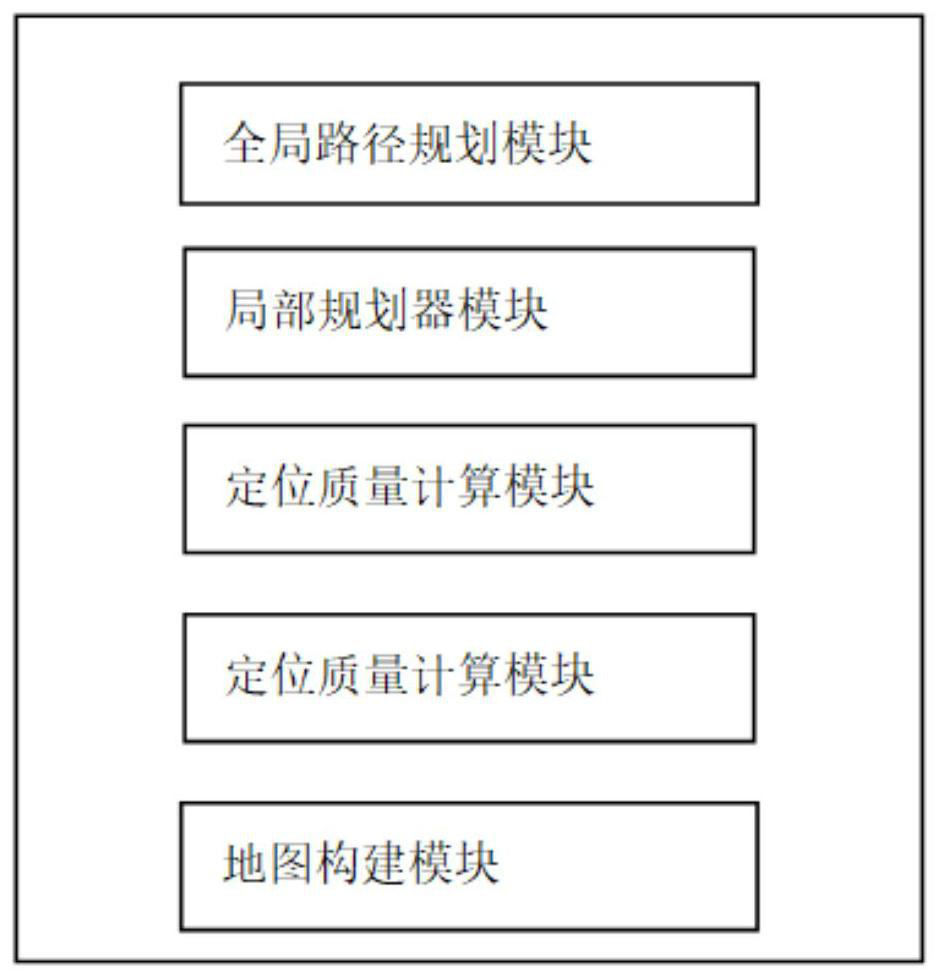
[0053] Such as figure 2As shown, a mobile robot path planning device for adaptively adjusting the tolerance of waypoints, based on radar sensors, includes:
[0054] A map building block for building a map of the environment based on radar sensors;
[0055] The global path planning module is used to perform global path planning according to the target point, the current position of the robot, and the environment map to obtain a global planning path, and the global planning path is a set of global planning path points;
[0056] The local planner module is used to start the local planner according to the global planning path point set, and controls the robot to move to the target point along the global planning path; and is used to calculate the global planning path point tolerance obtained by the path point tolerance calculation module A local planning path to the next global planning waypoint, and control the robot to move to the next global planning waypoint.
[0057] The p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More