

Integrated control method for yaw and roll stability of off-road vehicles driven by hub motors
An in-wheel motor and integrated control technology, applied in the field of automotive stability control, can solve problems such as functional conflicts, lack of coordination and selection of control systems, and inability to fully utilize multi-system joint control to achieve the effect of eliminating conflicts and ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The following specific embodiments are used to further describe the technical solution of the claims of the present invention in detail, so that those skilled in the art can understand the claims more clearly. The protection scope of the present invention is not limited to the following specific examples. The protection scope of the present invention includes the technical solution of the claims of the present invention made by those skilled in the art and is different from the following specific embodiments.
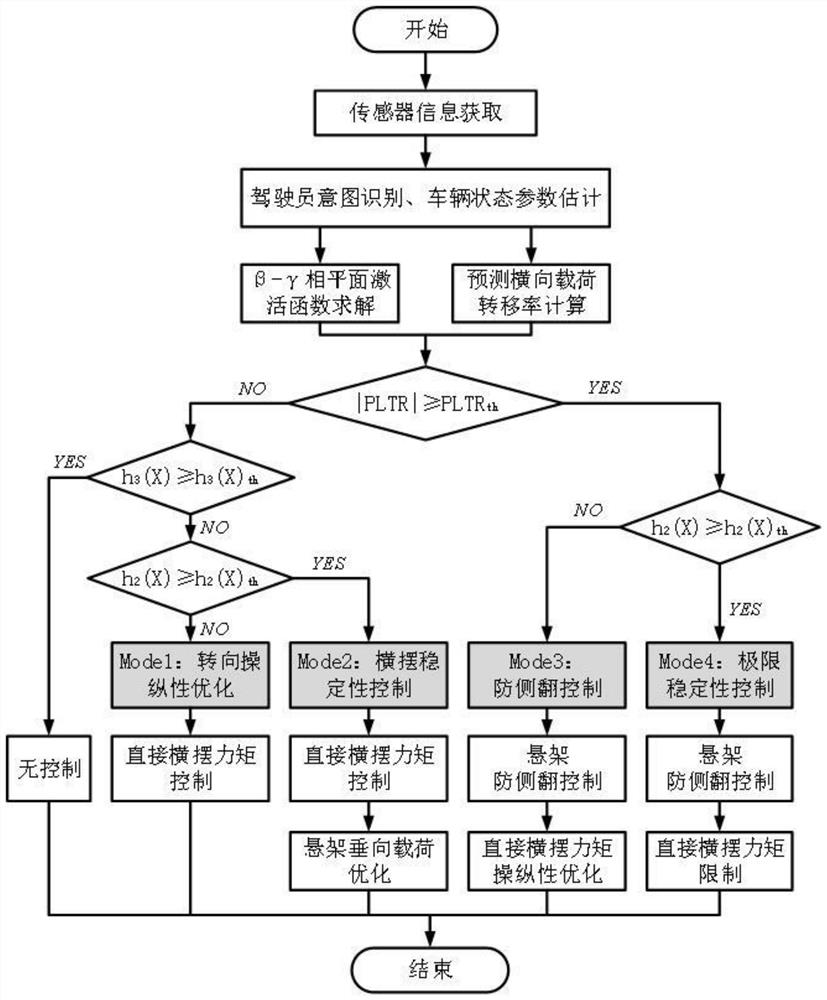
[0052] An integrated control system for yaw and roll stability of an off-road vehicle driven by a hub motor, including a roll stability control system and a yaw stability control system. When not controlled by the yaw and roll stability integrated control system, The roll stability control system and the yaw stability control system can be controlled independently.
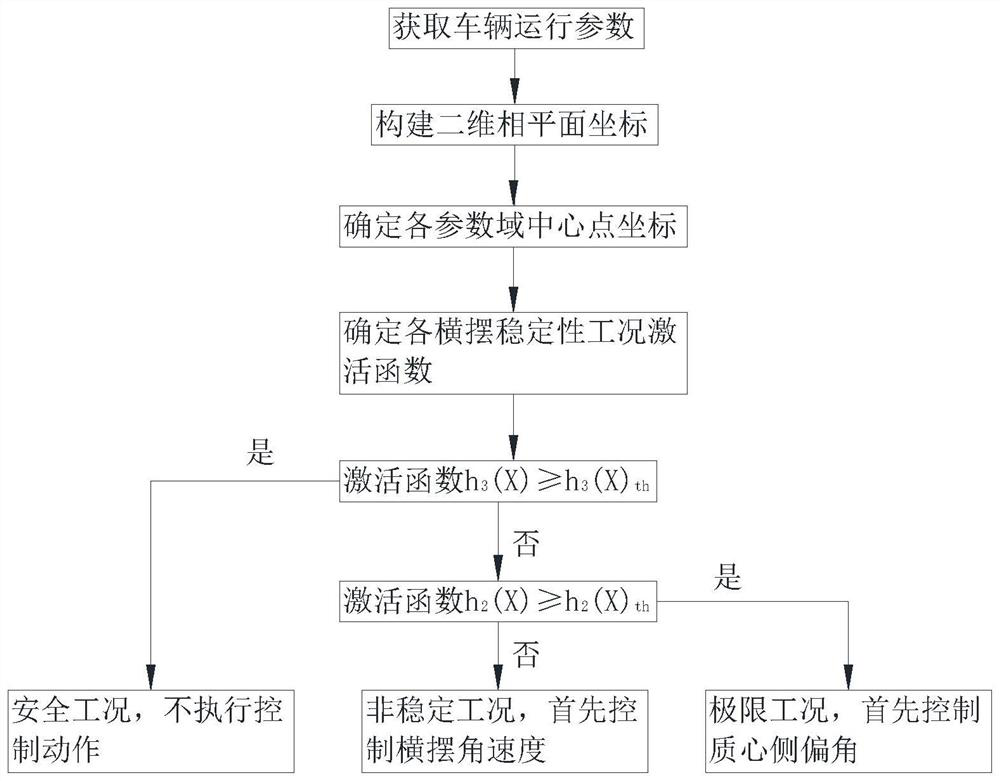
[0053] Such as figure 2 As shown, the independent control process of the roll stability contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More