Environmental cognition and decision-making control method, system and vehicle based on unmanned vehicle
An unmanned vehicle and control method technology, applied in the field of unmanned vehicle environmental cognition, that is, decision control, can solve problems such as poor driving experience, time difference, and increased safety risks, so as to increase confidence, improve driving experience, and improve driving experience. The effect of improving judgment and prediction ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0220] The present invention will be further described below in conjunction with the accompanying drawings.
[0221] In this embodiment, a method for environmental cognition and decision-making control based on an unmanned vehicle includes the following steps:
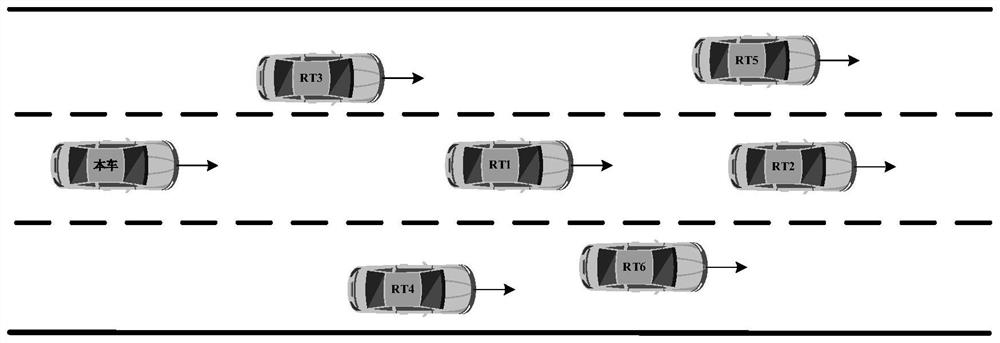
[0222] Screening and numbering of targets within the sensor's region of interest;
[0223] Track and predict motion trends for vehicles with different numbers;
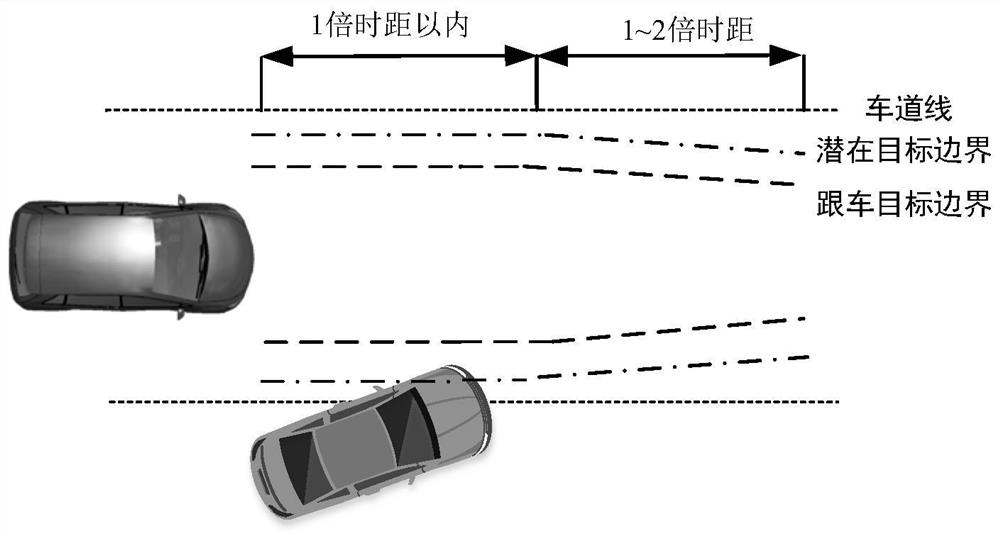
[0224] Set the pressure line boundary action line of the target;
[0225] Set potential target pressure line boundary action line;
[0226] Calculate the danger level of the target;
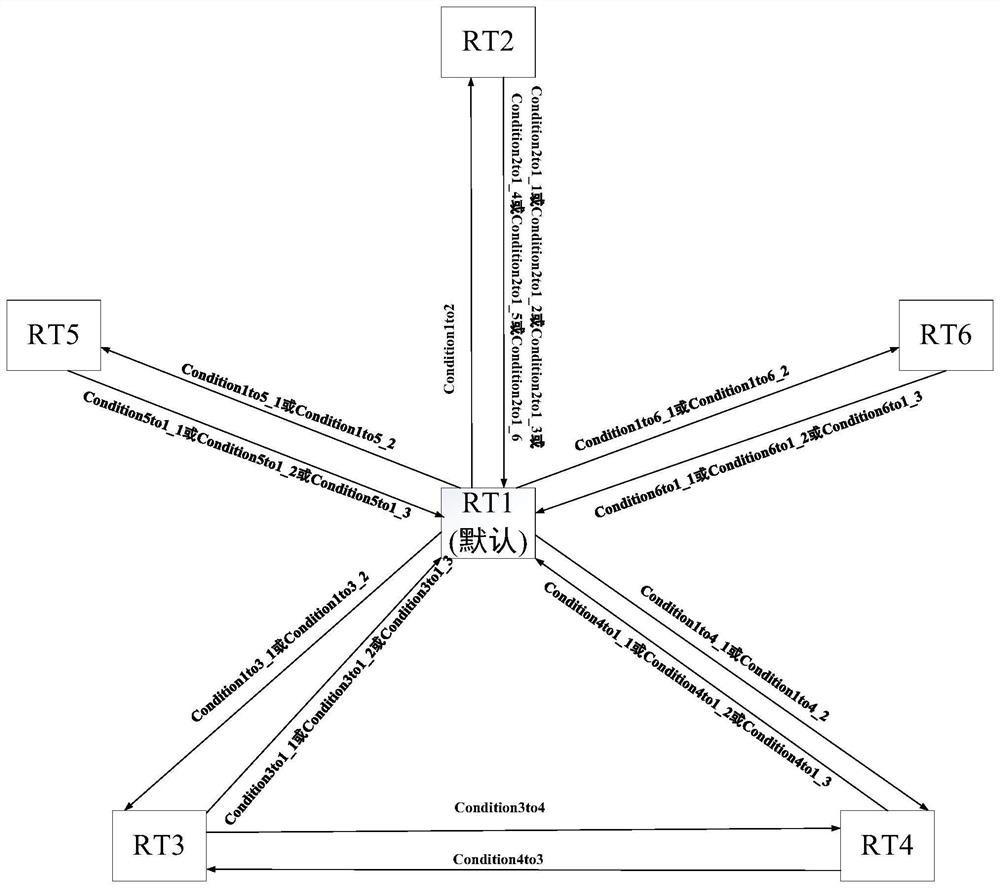
[0227] Follow-up target decision;
[0228] Potentially hazardous target decisions.
[0229] In this embodiment, the sensor region of interest is defined according to the following rules:
[0230] The area within 3 times the time distance from the center of the front bumper of the vehicle as the origin, including the area within 3 times the time distance in the longitudinal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More