

Rapid surveying and mapping method and device
A fast, surveying and mapping point technology, applied in the field of UAV surveying and mapping, can solve the problems of increasing equipment cost and personnel workload, inability to adapt to fast operations, and low efficiency of manual surveying and mapping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
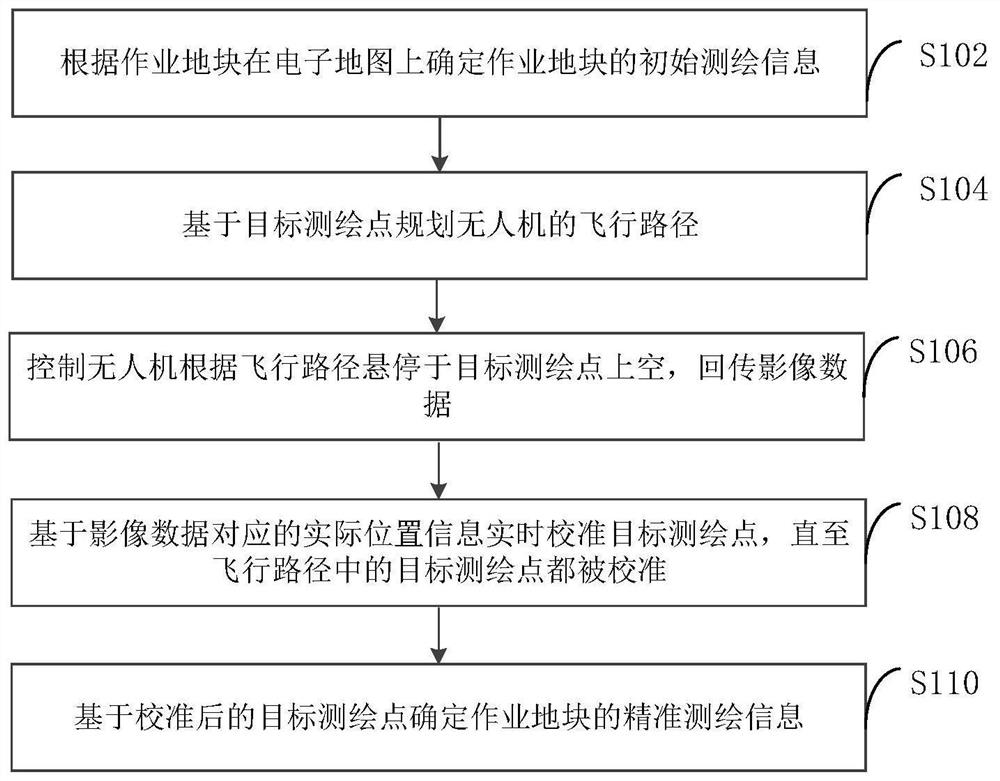
[0043] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Obviously, the described embodiments are part of the embodiments of the present invention, not all of them. the embodiment. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0044] At present, before using UAVs for plant protection operations, manual surveying and mapping and automatic aerial photography surveying and mapping methods can be used to survey and map the work plots.
[0045] Manual surveying and mapping is carried out through carrier phase differential technology (Real-time kinematic, RTK) handheld ground surveying and mapping terminal. User...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More