Adaptive control method and system for non-standard discrete-time nonlinear systems
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A nonlinear system and adaptive control technology, applied in the field of control, can solve problems such as nonlinear parameterization uncertainty, non-standard discrete-time nonlinear systems cannot adapt to standard discrete-time nonlinear system control methods, etc.
Active Publication Date: 2022-04-01
ACAD OF MATHEMATICS & SYSTEMS SCIENCE - CHINESE ACAD OF SCI +1
View PDF5 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0004] An adaptive control method and system for a non-standard discrete-time nonlinear system proposed by the present invention can solve the problem that the non-standard discrete-time nonlinear system cannot adapt to the control method of the standard discrete-time nonlinear system, and there is an implicit relative order , nonlinear parametric uncertainty, and technical issues with non-affine control inputs
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
example 1
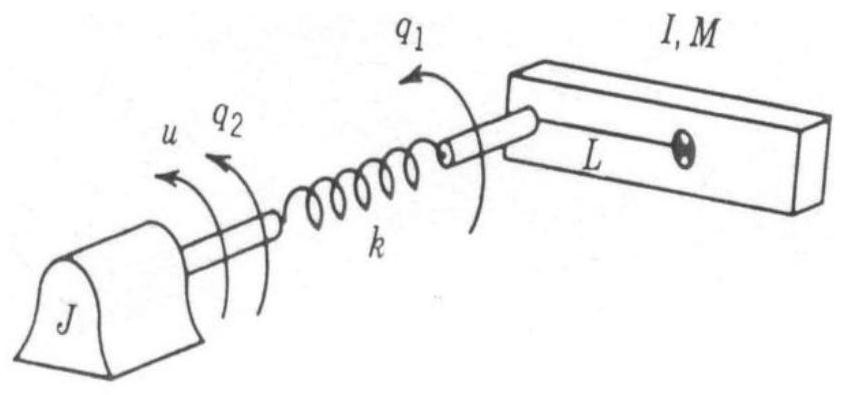
[0310] The self-adaptive control method of a non-standard discrete-time nonlinear system proposed by the invention can be effectively used in the design of the control law of a single-link flexible joint robot. For the sake of simplicity, the influence of damping is ignored in the actual control. First, a brief introduction to this type of robot system is given.
[0311] like figure 2 As shown, the motion equation of the single-link flexible joint robot is described as follows:
[0312]
[0313]
[0314] In the formula, q 1 ,q 2 is the angular position of the connecting rod and the motor, I and J are the moments of inertia, g is the acceleration due to gravity, k is the elastic constant of the joint spring, M and L represent the mass of the connecting rod and the position of the center of gravity, and u is the torque applied to the motor. First convert it into a mathematical model with control signals. make x 1 =q 1 , x 3 =q 2 , Then equations (53)(54) can ...
example 2
[0343] Take the following numerical simulation model as an example:
[0344]
[0345] x 2 (t+1)=0.2x 2 (t)5arctanx 1 (t)+1.3sinx 3 (t)
[0346] x 3 (t+1)=0.2x 3 (t)+1.6sinx 2 (t)
[0347] in, i=1, 2, 3 are the 3 state variables of the system, is the system input.
[0348] The system model is parameterized as
[0349]
[0350] y(t)=Cx(t)
[0351] in A known, and
[0352]
[0353] in
[0354] φ f (x(t))=[sinx 1 (t)cosx 3 (t), arctanx 1 (t), sin x 3 (t), sinx 2 (t)] T , C=[0,1,0] T . suppose C is unknown, φ f , φ g is known.
[0355] but,
[0356] Step 1: Suppose the system output y=x 2 (t), to establish a system output dynamic model;
[0357] It can be seen from the above that y(t+1)=0.2x 2 (t)+1.5arctanx 1 (t)+1.3sinx 3 (t) does not include the control input, so there are
[0358]
[0359] This means that y(t+2) contains both linear and nonlinear parameter uncertainties, and the nonlinearity depends on the control input. ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
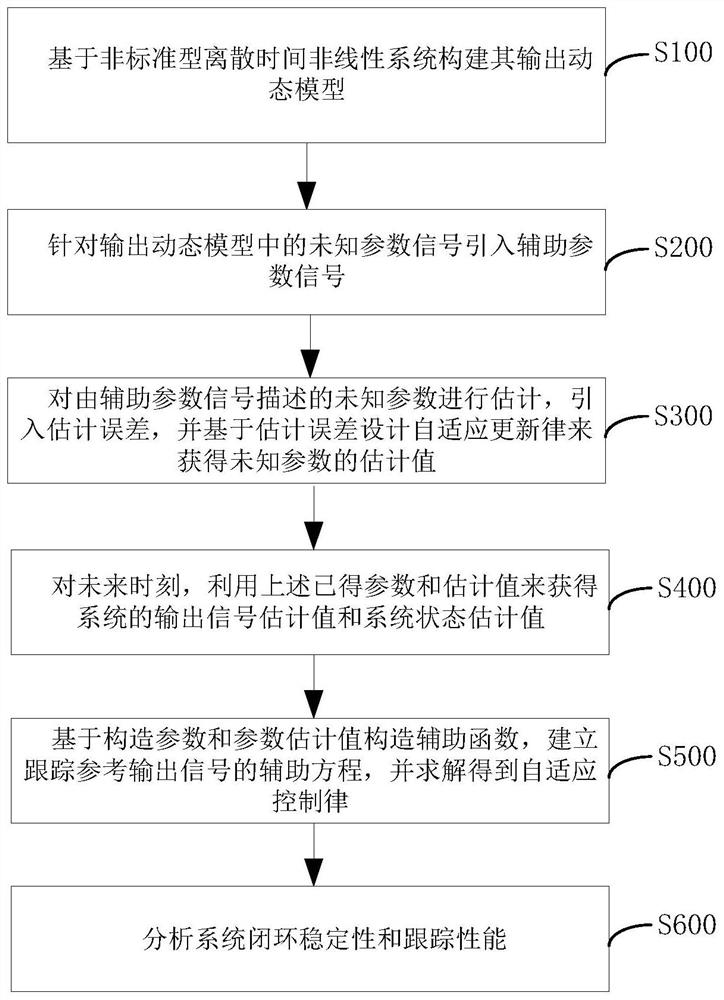
An adaptive control method and system for a non-standard discrete-time nonlinear system of the present invention, including constructing its output dynamic model based on the non-standard discrete-time nonlinear system; introducing auxiliary parameter signals; introducing an estimation error, and based on the estimation error Design an adaptive update law to obtain the estimated value of the unknown parameter; for the future t+1 time, use the above-mentioned parameters and estimated value to obtain the estimated value of the output signal of the system and the estimated value of the system state; establish an auxiliary equation for tracking the reference output signal , and solve the adaptive control law; analyze the system closed-loop stability and tracking performance. The present invention first uses feedback linearization and implicit function theory to construct a standard form dependent on the relative order, then proposes a method based on adaptive parameter reconstruction to deal with the uncertainty of linear and nonlinear parameters in dynamic output, and finally constructs a key The implicit function equation is used to obtain the adaptive control law to ensure the closed-loop stability and asymptotic output tracking of the system.
Description
technical field [0001] The invention relates to the technical field of control, in particular to an adaptive control method and system for a non-standard discrete-time nonlinear system. Background technique [0002] Adaptive control is a control technique that can effectively deal with linear or nonlinear systems with parameter uncertainties. In recent years, adaptive control design has been widely used by applying techniques such as feedback linearization and BackStepping. Most existing adaptive control methods focus on standard-form nonlinear systems with explicit relative order structures and infinite zero structures. However, in practical applications, many system models are non-standard, and their system parameters or structures have large uncertainties, such as aircraft flight control systems and smart grid systems. Therefore, it is of great theoretical and practical significance to study non-standard nonlinear systems with parameter uncertainties. [0003] For stan...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.
Login to View More
Patent Type & AuthorityPatents(China)
IPC IPC(8): G05B13/04
CPCG05B13/042
Inventor张纪峰张言军康宇赵延龙吕文君
OwnerACAD OF MATHEMATICS & SYSTEMS SCIENCE - CHINESE ACAD OF SCI



 Login to View More
Login to View More  Login to View More
Login to View More