

Automatic driving sensing system and method and vehicle
A technology of automatic driving and vehicles, applied in the field of automation, can solve problems such as incapable of mass production, incompleteness, and limited perception range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
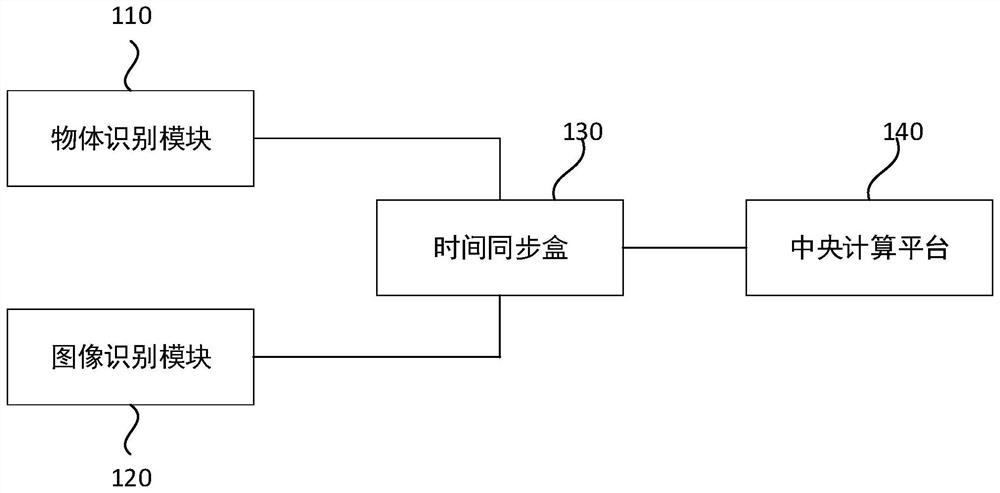
[0030] figure 1 A schematic structural diagram of an automatic driving perception system provided in Embodiment 1 of the present invention, the system is applicable to the situation of automatic driving of vehicles, wherein the automatic driving perception system can be implemented by software and / or hardware, the automatic driving perception system An object recognition module and an image recognition module can be included for autonomous driving perception.
[0031] Such as figure 1 As shown, an automatic driving perception system provided in Embodiment 1 of the present invention includes:
[0032] Object recognition module 110, image recognition module 120, time synchronization box 130 and central computing platform 140;
[0033] The time synchronization box 130 is connected to the object recognition module 110, the image recognition module 120 and the central computing platform 140 respectively;
[0034] The object recognition module 110 is used to determine the object ...
Embodiment 2
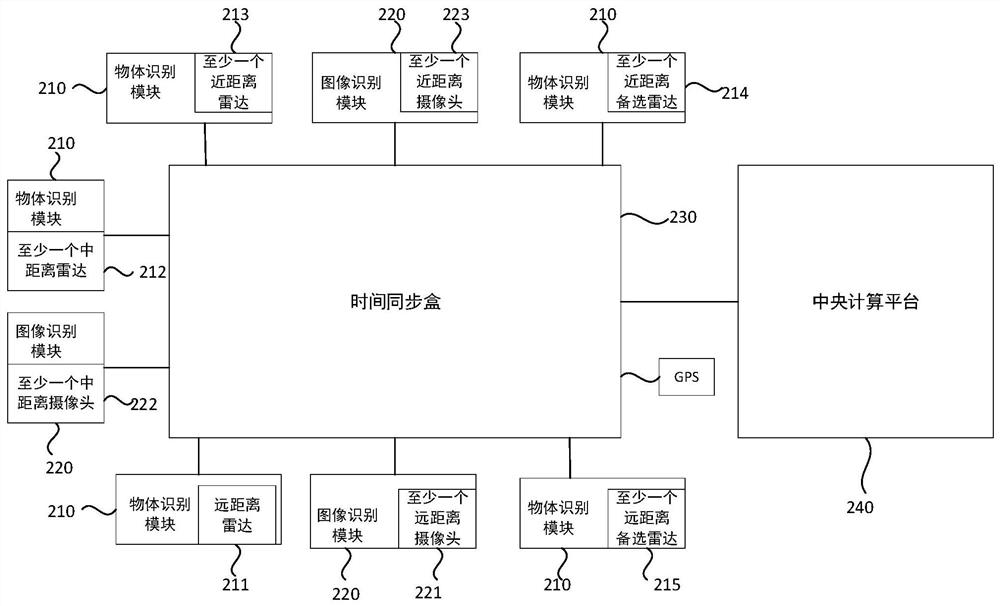
[0063] figure 2 It is a schematic structural diagram of an automatic driving perception system provided by Embodiment 2 of the present invention. Embodiment 2 is optimized on the basis of Embodiment 1 above. Reference may be made to Embodiment 1 for details not yet detailed in this embodiment, and details are not repeated here.
[0064] In this embodiment, the object identification module 210 includes: a long-distance radar 211, at least one mid-distance radar 212, and at least one short-distance radar 213; the object information includes: long-distance object information, mid-distance object information, short-distance object information information; the long-distance radar 211 is arranged in front of the center of the vehicle body to obtain information on long-distance objects; at least one mid-distance radar 212 is arranged around the roof to obtain information on mid-distance objects; at least one short-distance radar 213 is respectively arranged on The front, rear, left...
Embodiment 3
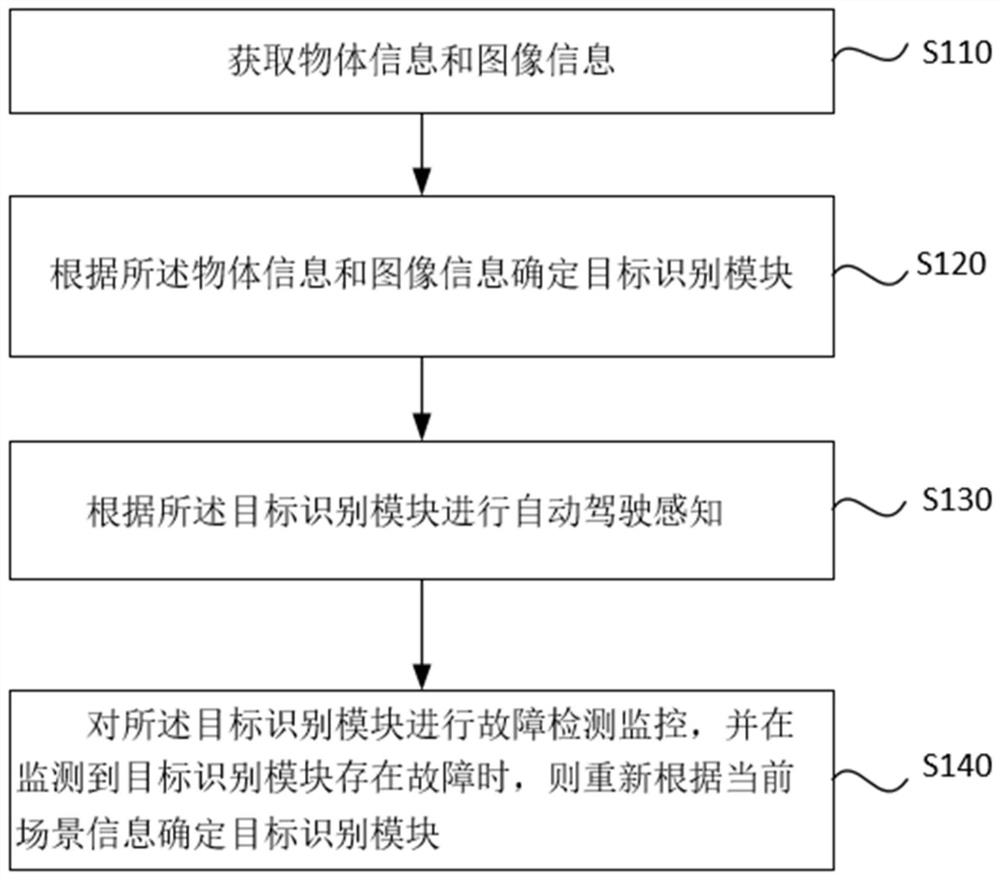
[0102] image 3 It is a schematic flow chart of an automatic driving perception method provided by Embodiment 3 of the present invention. This method is applicable to the situation of vehicle automatic driving. This method can be implemented by the central computing platform in the automatic driving perception system provided in Embodiment 1 or 2 above. To execute, the central computing platform can be implemented by hardware or software, and the method specifically includes the following steps:
[0103] S110. Obtain object information and image information.
[0104] In this step, the central computing platform can obtain object information from the object recognition module through the time synchronization box, and can obtain image information from the image recognition module through the time synchronization box.
[0105] Specifically, the time synchronization box sends the time information to the object recognition module and the image recognition module for time synchroni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More