

Laser radar calibration method and electronic equipment
A laser radar and calibration method technology, applied in the field of rail transit, can solve the problems of large error in calibration results, low efficiency, and complicated operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
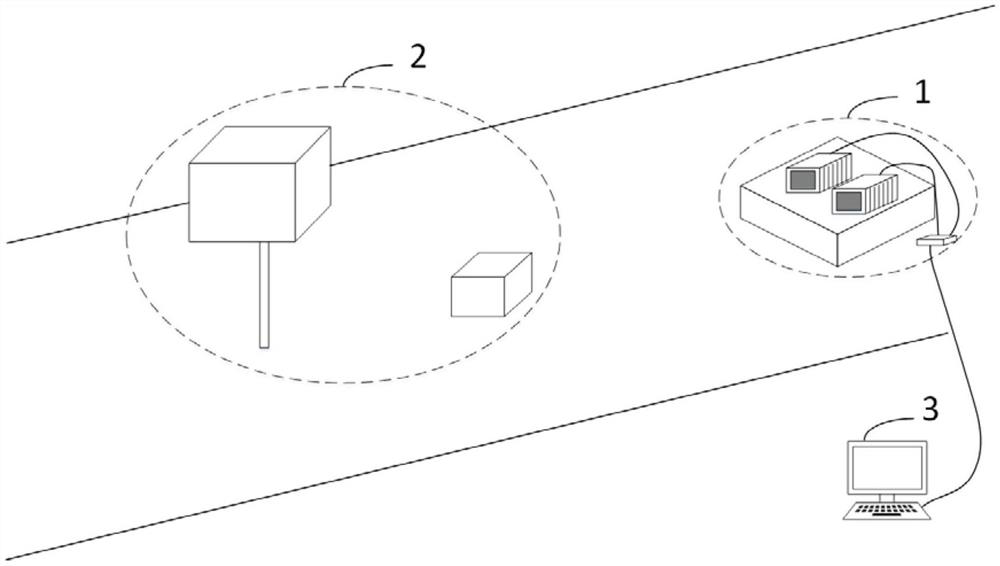
[0030] Calibration method of laser radar, including steps:
[0031] S1: Use a calibrator having at least three straight sides perpendicular to each other, and is called a calibration edge, and the edge is visible on three directions (front view, topping, and right view);
[0032] S2: In an open environment, hold the calibration body stationary, place the laser radar to be marked, and ensure that the laser point cloud corresponding to the calibration edge on the calibration body is not overlapped;
[0033] S3: Keep the laser radar is in a static state, the first laser radar and the second laser radar are scanned respectively, and the first point cloud data and the second point cloud data are obtained at a particular frame rate, and displayed on the visual software ;
[0034] S4: The first laser point cloud and the second laser point cloud are superimposed on a fixed frame number, and obtain the first thick dental cloud and the second thick minus cloud;
[0035] S5: In one embodimen...
Embodiment 2
[0074] The present invention also provides an electronic device, including a memory, a processor, and a computer program stored in the memory and can run on the processor, the processor implements the computer program. Steps to the calibration method of laser radar.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More