

Robot walking speed adjusting method
A technology of walking speed and adjustment method, which is applied to machine parts, cleaning machines, manual sweeping machines, etc. It can solve the problems of unstable adjustment and change of driving wheel speed, and achieve the effect of reducing static difference, reducing frustration, and improving smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions in the embodiments of the present invention will be described in detail below with reference to the drawings in the embodiments of the present invention.
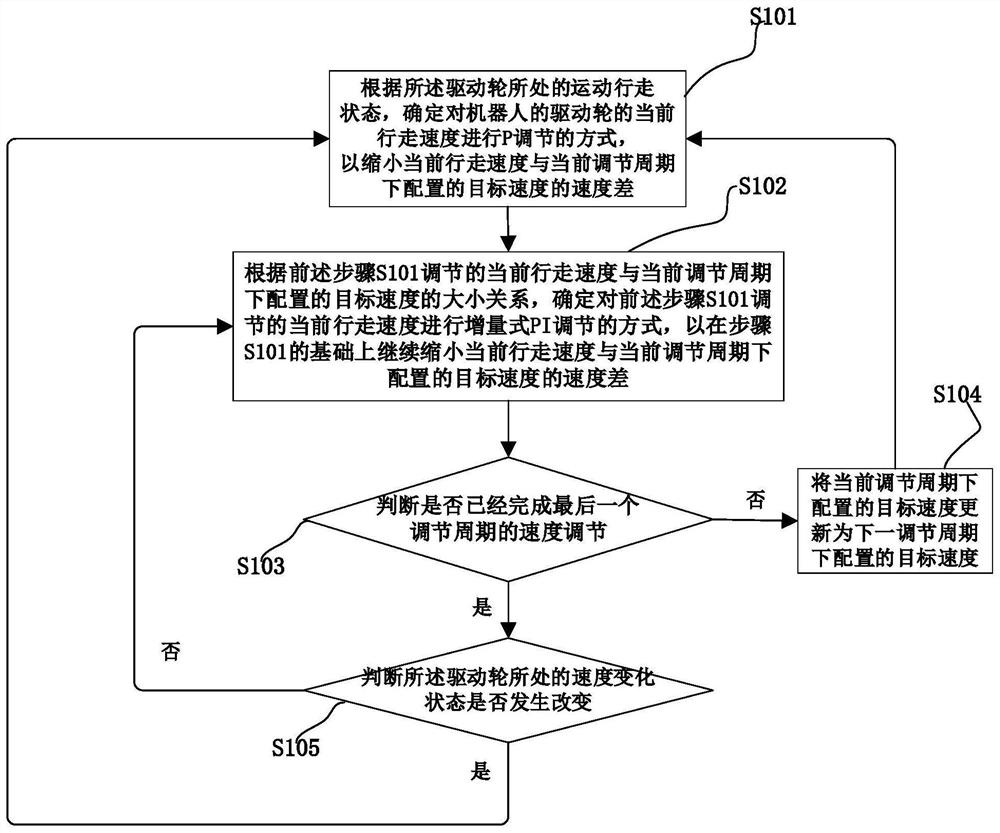
[0020]As an embodiment, the embodiment of the present invention discloses a method for adjusting the walking speed of a robot based on direction, and the PID controller provided inside the robot controls the driving wheels for execution. like figure 1 As shown, it specifically includes: step S101, according to the motion walking state of the driving wheel, determine the way of P adjustment to the current walking speed of the driving wheel of the robot, so as to reduce the current walking speed and the target configured under the current adjustment cycle Speed difference; then go to step S102. In step S101, the robot receives a pre-configured fixed expected acceleration and an adjustment cycle for speed adjustment, and then the robot calculates the expected target speed for each adjustment c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More