

A kind of robot remote control system and control method thereof
A technology of remote control system and control method, applied in the field of robot remote control system and its control, can solve the problems of not being able to flexibly control the robot, not being able to interrupt instructions, and not being able to jump instructions, etc., to achieve the effect of facilitating the remote control of the robot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
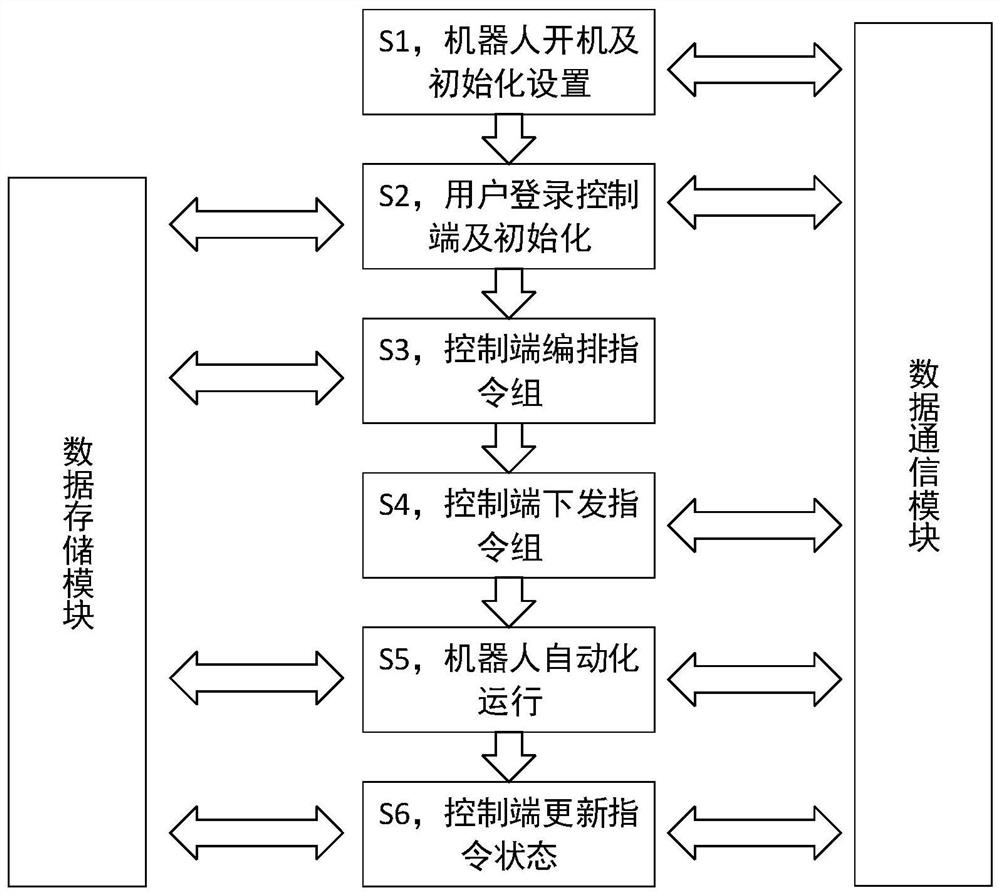
[0038] combine figure 1 Describe this embodiment. In this embodiment, a robot remote control system involved in this embodiment includes a remote control terminal, an instruction identification unit, an instruction update unit, an instruction arrangement unit, an instruction execution unit, and an instruction judgment unit.
[0039] The remote control terminal is used to establish a connection with the robot and perform human-computer interaction;
[0040] The instruction identification unit is used to obtain the instruction group of the current robot in real time;
[0041] The instruction update unit is configured to issue an update instruction to the instruction identification unit, and the instruction identification unit acquires the update instruction of the current robot in real time;
[0042] The instruction arranging unit is used for arranging the cascading relationship of the instructions in the instruction group according to the received user instruction;
[0043] T...
Embodiment 2
[0046] This embodiment is described with reference to Embodiment 1. In this embodiment, a robot remote control system involved in this embodiment further includes a communication unit and a data storage unit, and the communication unit is used for wireless communication with the remote control terminal. , the data storage unit is used to store the current state information of the robot. The data storage module saves the login status and command group data of the robot; the data communication module is used for data communication between the remote control terminal and the robot.
Embodiment 3
[0048] This embodiment will be described with reference to Embodiment 1. In this embodiment, a robot remote control system involved in this embodiment, the instruction unit includes a unique identification code, an instruction type, an upper-level instruction, a lower-level instruction, an interruption identifier, Destroy parameters, run parameters and end parameters. The instruction group is composed of different instruction units. The instruction unit includes the unique identification code, instruction type, upper-level instruction, lower-level instruction, interrupt identifier, destruction parameter, operation parameter and end parameter:
[0049] (1) Unique identification code: The identification code is globally unique, and the identification codes of the same instruction type are also different.
[0050] (2) Command type: used to distinguish different functional types of the robot, such as speaking, motion, playing video, playing pictures, etc.
[0051] (3) Upper-level...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More