

Automobile automatic driving remote control system
A technology of remote control and automatic driving, applied in the fields of automatic guided vehicles, intelligent perception, and laser guided vehicles, it can solve problems such as insufficient comprehensiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
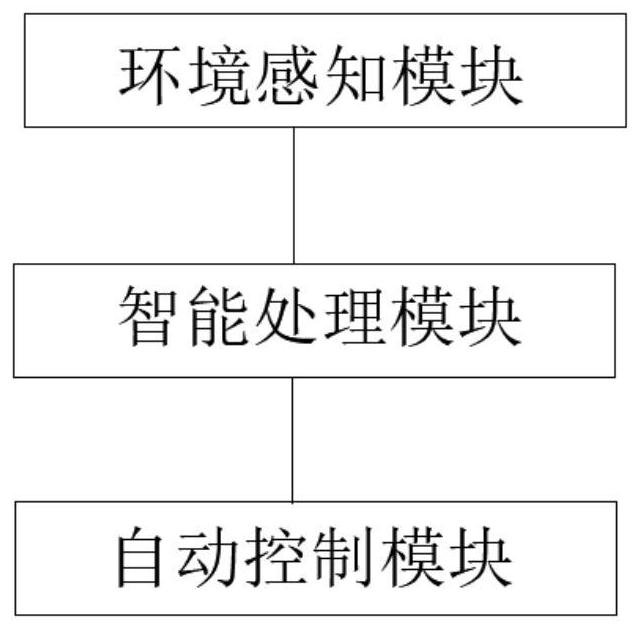
[0059] according to figure 1 As shown, the embodiment of the present invention provides a remote control system for automatic driving of a car, which is characterized in that it includes an environment perception module, an intelligent processing module and an automatic control module; wherein,
[0060] The environment perception module is used to detect and perceive the driving environment of the target vehicle based on the preset multi-sensor fusion technology, and determine the environment perception information;
[0061] The intelligent decision-making module is used to receive and process the environmental perception information, formulate a corresponding adaptive control strategy, transmit the adaptive control strategy to a preset human-computer interaction system for intelligent processing, and generate corresponding intelligent decision-making instructions ;
[0062] The automatic control module is used to feed back the intelligent decision instruction to the preset c...
Embodiment 2
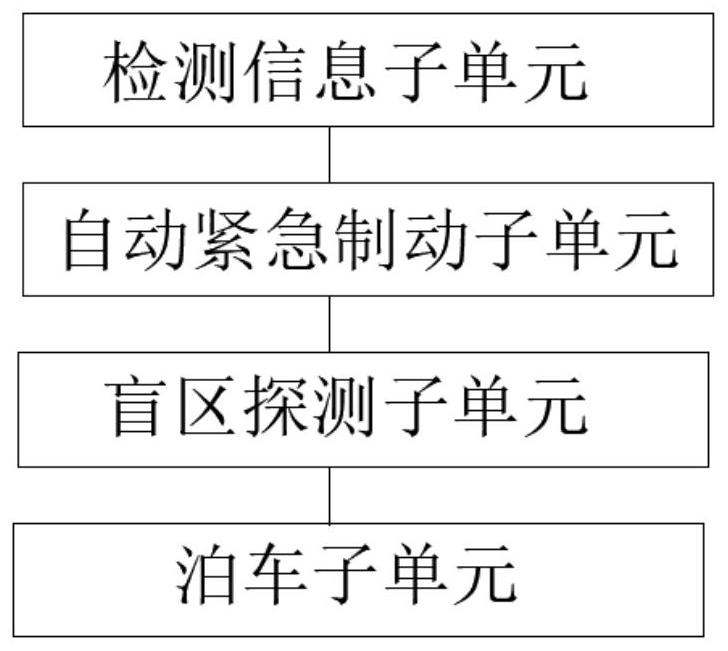
[0066] The technical solution provides an embodiment. The sensors used in the multi-sensor fusion technology include at least a laser radar sensor, a visual sensor, a millimeter wave radar sensor, an ultrasonic radar sensor, a camera, a speed sensor, an acceleration sensor, a steering angle sensor, a lateral Slew rate sensor and wheel speed sensing.
[0067] The working principle and beneficial effect of the above-mentioned technical scheme are:
[0068] The ultrasonic radar sensor of this technical solution can draw a parking map with the visual sensor, and dynamically plan the parking path in real time to guide the target vehicle to automatically control the steering wheel to drive into the parking position. The millimeter-wave radar can detect long-distance around the clock. Wave radar can detect the blind area of the rearview mirror. Lidar can detect the long distance and can also measure the lateral position. Emergency braking sensors, steering angle sensors, yaw rate ...
Embodiment 3
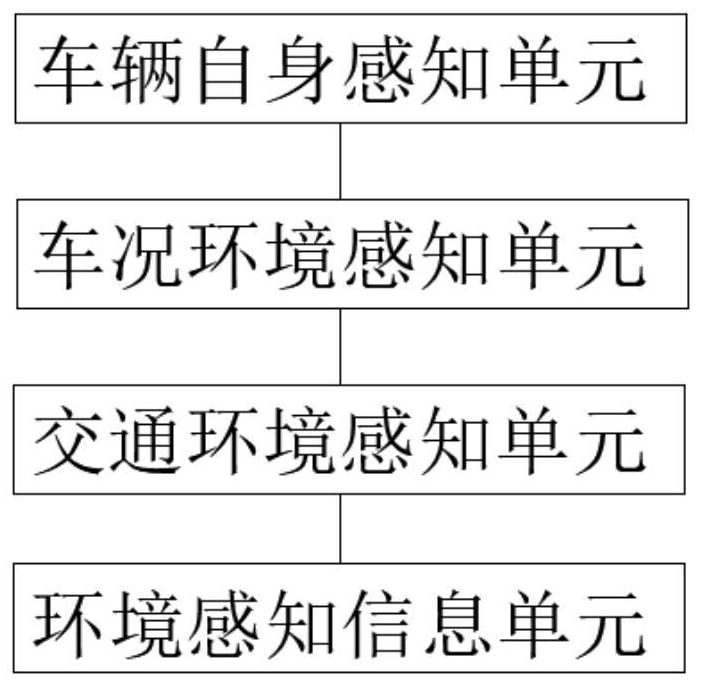
[0070] The technical solution provides an embodiment, the environment perception module includes a vehicle self perception unit, a vehicle condition environment perception unit, a traffic environment perception unit and an environment perception information unit; wherein,
[0071] The vehicle self-perception unit is used to detect and perceive the state information of the target vehicle itself, and determine the first perception information; wherein,
[0072] The first perception information includes at least state information of the target vehicle's own accelerator, brake, steering wheel, turn signal and gear position;
[0073] The vehicle condition environment perception unit is used to detect and perceive the position, speed and acceleration of the target vehicle based on the preset GPS positioning system, and determine the second perception information;
[0074] The traffic environment perception unit is used to detect and perceive the traffic environment where the target ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More