

Four-wheel independent driving wheel carrier posture-adjustable vehicle comprehensive driving system
A four-wheel independent drive and drive system technology, applied in electric vehicles, control drives, vehicle components, etc., can solve the problems of single power output, difficult to achieve power coordination between walking and attitude adjustment, and limited adjustment range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the protection scope of the present invention.
[0045] The application principle of the present invention will be described in detail below in conjunction with the accompanying drawings.
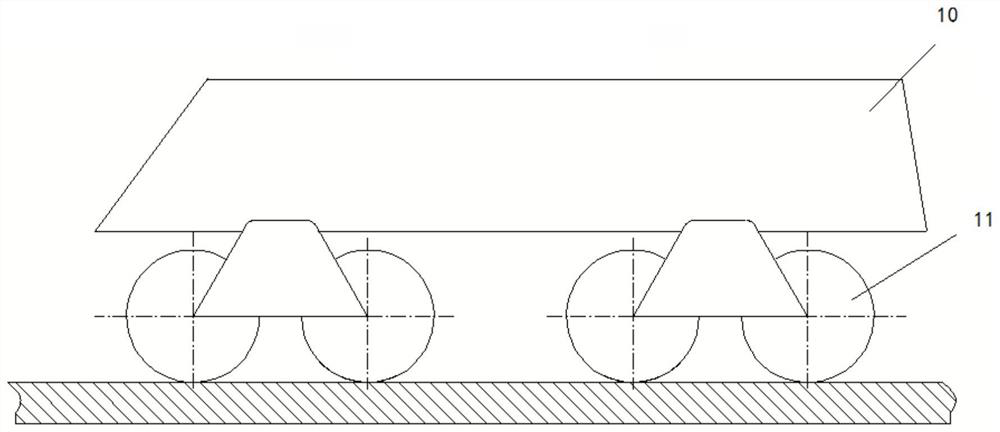
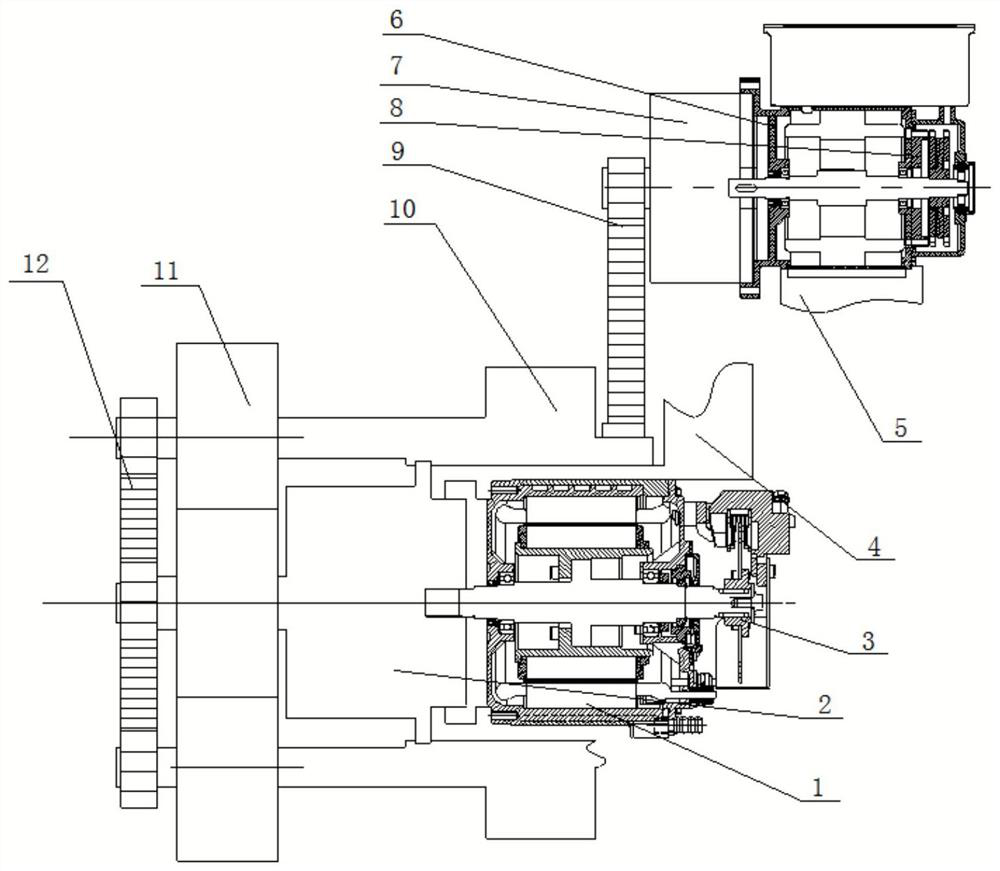
[0046] Such as Figure 1-2 As shown, the present invention provides a comprehensive drive system for a four-wheel independently driven wheel frame with adjustable attitude vehicle, comprising:
[0047] Four wheel frames 10;
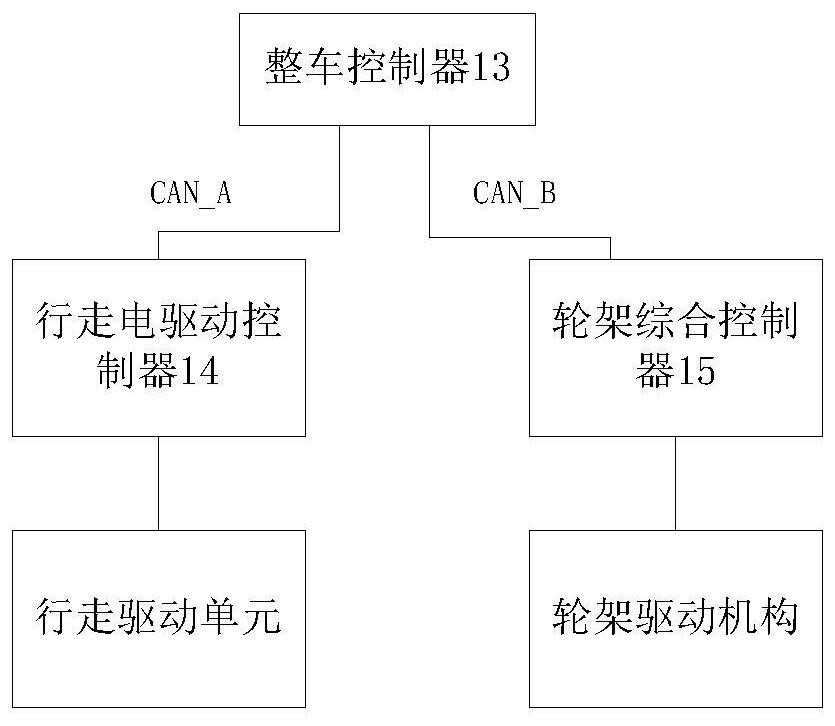
[0048] The control unit includes a vehicle controller 13, and a wheel frame integrated controller 15 and a walking electric drive controller 14 connected to the vehicle controller 13;
[0049] The four wheel frame drivin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More