

Device and method for improving steering performance of four-wheel independent drive wheel frame adjustable vehicle steering
A four-wheel independent drive and steering performance technology, which is applied in the direction of power device, electrical device, control drive, etc., can solve the problems of wheelbase adjustment influence, slow wheelbase adjustment speed, complex structure, etc., and achieve the reduction of steering resistance torque , Improve the effect of steering performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
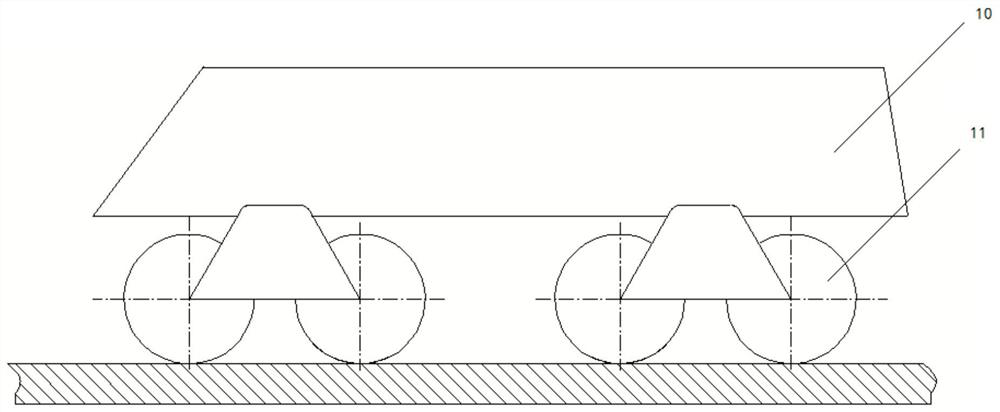
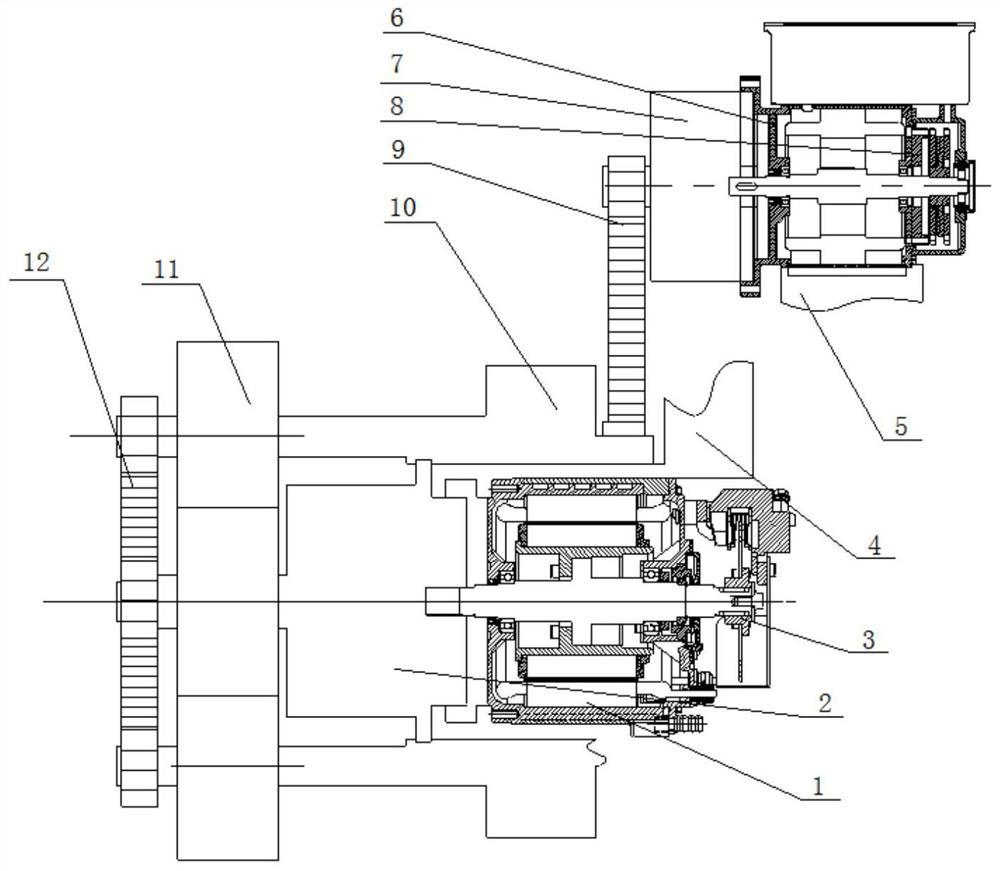
[0052] An embodiment of the present invention provides a four-wheel independent drive wheel frame attitude-adjustable vehicle steering performance improvement device, including:
[0053] Four wheel frames 10;
[0054] controller;
[0055] Four wheel frame driving mechanisms are connected with the controller, and each wheel frame driving mechanism is respectively connected with the corresponding wheel frame to control the position and attitude of the corresponding wheel frame;
[0056] Four groups of wheel units, each group of wheel units includes at least two wheels 11, each wheel 11 is arranged on the same side of the corresponding wheel frame, and the position and attitude are controlled by the corresponding wheel frame;
[0057] Four groups of travel drive units are connected to the controller, and each group of travel drive units is connected to the corresponding wheel unit respectively, and controls the running state of each wheel 11 in the corresponding wheel unit to be...
Embodiment 2
[0073] An embodiment of the present invention provides a method for improving the steering performance of a vehicle with an attitude-adjustable four-wheel independent drive wheel frame based on any one of Embodiment 1, which is characterized by comprising the following steps:
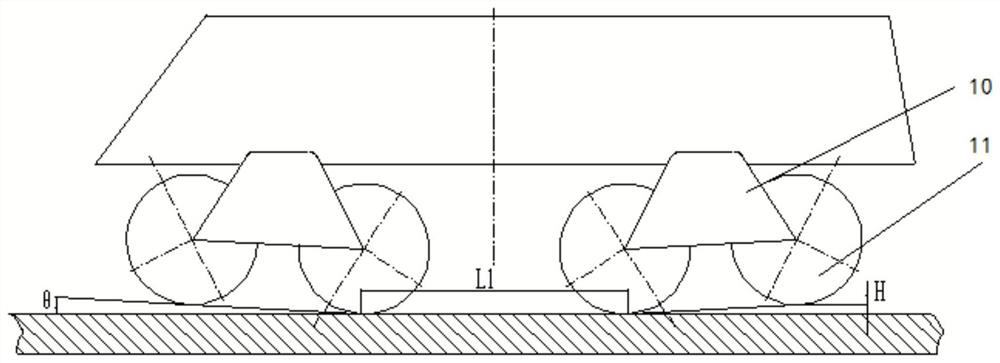
[0074] Use each wheel frame driving mechanism to control the posture of the corresponding wheel frame, and then change the posture and posture of the wheel 11 connected to the wheel frame;
[0075] Each running drive unit is used to control the running state of each wheel 11 in the corresponding wheel unit to be a running state, a steering state or a stopped state, so as to improve the steering performance of the four-wheel independent driving wheel frame and the attitude-adjustable vehicle.
[0076] In a specific implementation manner of the embodiment of the present invention, the method further includes: the turning speed of the wheel frame meets the requirement of steering during driving at low speed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More